ЭЛЕКТРОПРОВОДЯЩИЕ ЭЛАСТОМЕРЫ НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК ДЛЯ СОЗДАНИЯ ИСКУССТВЕННОЙ МЫШЦЫ
advertisement

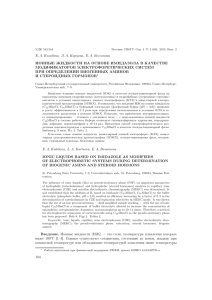
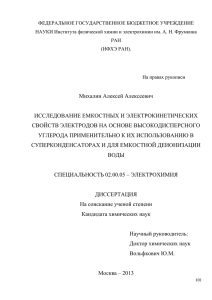
ЭЛЕКТРОПРОВОДЯЩИЕ ЭЛАСТОМЕРЫ НА ОСНОВЕ УГЛЕРОДНЫХ НАНОТРУБОК ДЛЯ СОЗДАНИЯ ИСКУССТВЕННОЙ МЫШЦЫ С.С. Корнилов, Е.А. Бубнова Национальный исследовательский университет МИЭТ, Москва E-mail: bubnova_zhenya@mail.ru В теле человека около 640 мышц. На мышечную ткань приходится до 40% от общего веса, т.е. это в среднем 20-30 кг. Мышцы, как и другие органы человека подвержены заболеваниям. При поражении мышц конечностей больной лишается возможности свободного управления ими. Особенно распространены болезни мышц сердца. Вот почему работы многих ученых направлены на создание функциональной биосовместимой искусственной мышцы. Более того, появляется все большая необходимость оснащения человекоподобных роботов искусственными мышцами. Искусственными мускулами или приводами принято называть материалы, способные преобразовывать различные виды энергии – электрическую, химическую, термическую и другие в механическую энергию и совершать полезную работу. Помимо этого структуры должны быть гибкими, прочными и способными развивать значительное усилие. Главой проблемой при создании искусственных мышц является получение материала, удовлетворяющего всем свойствам мышцы. В настоящее время перспективным является эластомерный материал - это полимер с эластическими свойствами. В качестве наполнителя, придающего эластомеру свойства гибкости и проводимости, все чаще используют углеродные нанотрубки (УНТ) (длинные, полые цилиндры с необычайно прочными связями, удерживающими их вместе) благодаря тому, что они обладают уникальными свойствами. Так, предел прочности на разрыв на порядок выше, чем для высокопрочной стали, теплопроводность в два раза больше, чем у алмаза, электрическая проводимость сопоставима с проводимостью меди, а максимальная плотность тока составляет 109 А/см2. При приложении к этим искусственным мышцам напряжения в ± 4 В, деформация привода достигает 8 % [1]. Приводы на основе углеродных нанотрубок в основном представляют собой электрохимическую систему, в которой УНТ (однослойные ОУНТ, многослойнее МУНТ) выступают в качестве электродов. Формирование двойного электрического слоя на границе раздела нанотрубки-электролит, путем приложения напряжения, передает заряд нанотрубкам, что приводит к механическому ответу материала (деформации). Электрохимически одна сторона устройства заряжена отрицательно, а другая положительно; обе стороны расширяются, но отрицательно заряженная сторона расширяется больше, чем положительно заряженная [2]. Таким образом, вся конструкция изгибается (Рис. 1а). Установлено, что из ОУНТ можно создать гель [3] (так называемый Баки-гель), если смешать с ионной жидкостью на основе имидазолия. Этот композитный материал был использован, при создании трехслойного изгибающегося привода, полимерный слой которого, был сделан на основе ионной жидкости и расположен между слоями Баки-гель электродов [4]. Такая искусственная мышца обладает высокой скоростью реагирования (4 мм на 0,05 с), малым напряжением приведения в несколько вольт и высокой прочностью на 10000 раз непрерывных операций. а б Рисунок 1 – a - Принцип работы трехслойного привода на основе углеродных нанотрубок, б - Схематическое изображение установки по измерению смещения образца при пропускании электрического тока. Также наряду с ОУНТ для приготовления Баки-геля используются МУНТ, электрические свойства которых не зависят от хиральности и которые являются более дешевыми. Трехслойный привод может быть легко изготовлен путем литья слой за слоем на стеклянной пластине при 60°С слоев электродов и электролита между ними. Эластомер состоит из МУНТ, поливинилиденфторида (ПВДФ) и ионной жидкости (ИЖ) 1-бутил-3метилимедазолий тетрафторборат [bmim][BF4]. Проводимость эластомера составила 5,6∙10-4 См/см. Почти линейная зависимость наблюдается между поданным электрическим зарядом и смещением материала, где линейное отклонение составило 7,0 ± 1,6 мкм/мС. Установлено, что получить привод, функционирующий как на воздухе, так и в вакууме можно использовав ионную жидкость в качестве активного слоя, заключенного между электродами на основе Баки-геля[5]. Поверхностное сопротивление такого материала не превышало нескольких Ом на длине 1см. С помощью лазерного оборудования было зарегистрировано смещение образца на 10 мм при приложении напряжения в 5 В (Рис. 1б). Улучшить свойства привода функционирующего на воздухе удалось путем замены ранее использовавшегося платинового или золотого электрода электродом на основе МУНТ в ионном металл полимер- ном композите (ИМПК) [6]. Растворитель из МУНТ формируется по обе стороны ионных полимерных мембран в качестве электродов путем напыления и обжига с одной и той же подложкой - твердой пленкой Нафиона (полимер, эффективно проводящий ионы и воду сквозь наноструктуру). Рисунок 2 – Механический ответ ИМПК актуатора на основе МУНТ-графена при подаче напряжения а) 2 В б) -2В Полученный ИМПК привод имеет длину 25 мм, ширину 7 мм и толщину 350 мкм. Перемещение эластомера измерялось, зафиксировав один конец ИМПК с помощью оборудования, и проводилось измерение движения другого конца (Рис. 2). Максимальное отклонение ИМПК платинового и МУНТ электродов составило ±1,89 мм и ±2,33 мм соответственно. Таким образом, многие учёные мира работают над созданием искусственных мышц на основе эластомеров и УНТ, которые необходимы для усовершенствования робототехники, разработке интеллектуальных датчиков, медицинских имплантатов и многого другого, где нужна большая мощность и прочность в малых масштабах. Возможно, в скором будущем, человечество получит отличную возможность восстановить утраченные конечности. Библиографический список 1. Citation L., Sheng et al. Conductive filler morphology effect on performance of ionic polymer conductive network compsite actuators // Electroactive Polymer Actuators and Devices. 2010. P.764219-10. 2. Fraysse J., Minett A., Jaschinski O. et al. Carbon nanotubes acting like actuators // Carbon. 2002. V.40(10). P. 1735-1739. 3. Fukushima T., and et al. Ionic liquids for soft functional materials with carbon nanotubes // Chemistry - A European Journal. 2007. V. 13, P. 5048-5058. 4. Takeuchi I., Asaka K., Kiyohara K., et al. Electromechanical behavior of fully plastic actuators based on bucky gel containing various internal ionic liquids // Electrochim Acta. 2009. V. 54. P. 1762-1768. 5. Asaka K. and et al. Actuator element and production method thereof // Патент US 2006/0266981 A1. 6. Yang W., Choi H., Cho S. Carbon nanotube–graphene composite for ionic polymer actuators // Smart Materials and Structures. 2012. V. 21(5). P. 1-7 Сведения об авторах Корнилов Сергей Сергеевич – магистр, дата рождения: 02.09.1992г., тел. 8-916-129-21-06, sergey-kornilov@yandex.ru Бубнова Евгения Андреевна – магистр, дата рождения: 24.11.1991г., тел. 8-916-853-70-65, bubnova_zhenya@mail.ru Вид доклада: устный (/ стендовый)