3G_L8-17
advertisement

43
ЛЕКЦИЯ 8 (19.03.04)
ГЛАВА 3 УПРАВЛЕНИЕ ЗАДАЧАМИ И ПАМЯТЬЮ
Одной
из
важнейших
функций
ОС
является
организация
рационального использования ресурсов компьютера (процессоры,
память, внешние устройства, данные и программы). Одна и та же
вычислительная система может работать по-разному под управлением
разных ОС. Главные сложности при управлении ресурсами возникают
в мультипрограммных системах. Способы распределения времени
центрального процессора сильно влияют как на скорость выполнения
отдельных вычислений, так и на эффективность вычислительной
системы в целом.
При
рассмотрении
вопросов
данной
главы
не
будем
разграничивать понятия "процесс" и "поток", используя обобщающий
термин "задача".
Операционная система выполняет следующие основные функции,
связанные с управлением задачами:
создание и удаление задач;
планирование процессов и диспетчеризация задач;
синхронизация задач, обеспечение их средствами коммуникации.
§1 Подсистема управления процессами и потоками
Система управления задачами обеспечивает их прохождение через
компьютер. В зависимости от состояния процесса ему необходимо
выделить тот или иной ресурс. Например, новый процесс нужно
разместить в памяти, выделив ему адресное пространство; включить
в список задач, конкурирующих за процессорное время.
Одной
из
основных
подсистем
мультипрограммной
ОС,
непосредственно влияющей на функционирование вычислительной
машины, является подсистема управления процессами и потоками.
Она занимается их созданием и уничтожением, а также распределяет
процессорное время между одновременно существующими в системе
процессами и потоками.
Хотя потоки возникают и выполняются асинхронно, но при
одновременном выполнении в системе нескольких задач у них может
возникнуть необходимость во взаимодействии, например, при обмене
данными. Поэтому синхронизация потоков является одной из важных
функций подсистемы управления процессами и потоками.
Взаимодействие между процессами осуществляется с помощью
общих переменных и специальных базовых операций, называемых
примитивами.
Подсистема управления процессами и потоками имеет возможность
выполнять над процессами следующие операции:
создание (порождение)/уничтожение процесса;
приостановка/возобновление процесса;
блокирование/пробуждение процесса;
запуск процесса;
изменение приоритета процесса;
44
Подсистема управления процессами и потоками ответственна за
обеспечение процессов необходимыми ресурсами. ОС поддерживает в
памяти
специальные
информационные
структуры,
в
которые
записывает, какие ресурсы выделены каждому процессу. Ресурс
может назначаться процессу в единоличное пользование или в
совместное пользование с другими процессами. Некоторые из
ресурсов выделяются процессу при его создании, а некоторые –
динамически по запросам во время выполнения. Ресурсы могут быть
приписаны процессу на все время его жизни или только на
определенный период. При выполнении этих функций подсистема
управления процессами взаимодействует с другими подсистемами ОС,
ответственными за управление ресурсами, такими, как подсистема
управления памятью, подсистема ввода-вывода, файловая система.
1.1 Создание и удаление процессов и потоков
Создать процесс – это прежде всего означает создать описатель
процесса, в качестве которого выступает одна или несколько
информационных структур, содержащих все сведения о процессе,
необходимые операционной системе для управления им. Подробно
этот вопрос рассматривался ранее, сейчас только напомним, что в
число таких сведений могут входить, например, идентификатор
процесса, данные о расположении в памяти исполняемого модуля,
степень привилегированности процесса (приоритет и права доступа)
и т.п.
Создание
процесса
включает
загрузку
кодов
и
данных
исполняемой программы данного процесса с диска в оперативную
память.
При
этом
подсистема
управления
процессами
взаимодействует с подсистемой управления памятью и файловой
системой. В многопоточной системе при создании процесса ОС
создает для каждого процесса как минимум один поток выполнения.
При создании потока так же, как при создании процесса, ОС
генерирует специальную информационную структуру – описатель
потока, который содержит идентификатор потока, данные о правах
доступа и приоритете, о состоянии потока и т.п. После создания
поток
(или
процесс)
находится
в
состоянии
готовности
к
выполнению (или в состоянии бездействия, если речь идет об ОС
специального назначения).
Создание и удаление задач осуществляется по соответствующим
запросам от пользователей или от других задач. Задача может
породить новую задачу – во многих системах поток может
обратиться к ОС с запросом на создание т.н. потоков-потомков.
Порождающая
задача
называется
"предком",
"родителем",
а
порожденная – "потомком" или "дочерней задачей". "Предок" может
приостановить или удалить свою дочернюю задачу, в то время как
"потомок" не может управлять "предком".
В разных ОС по-разному строятся отношения между потокамипотомками
и
их
родителями.
В
одних
ОС
их
выполнение
синхронизируется
(после
завершения
родительского
потока
с
выполнения снимаются все его потомки), в других потомки
выполняются асинхронно по отношению к родительскому потоку.
После завершения процесса ОС "зачищает следы" его пребывания
в системе – закрывает все файлы, с которыми работал процесс,
45
освобождает области оперативной памяти, отведенные под коды,
данные
и
системные
информационные
структуры
процесса.
Выполняется коррекция очередей ОС и списков ресурсов, в которых
имелись ссылки на завершаемый процесс.
1.2 Планирование и диспетчеризация процессов и потоков
Стратегия планирования определяет, какие процессы выбираются
на выполнение для достижения поставленной цели. Стратегии могут
быть различными, например:
по возможности заканчивать вычисления в том же самом порядке,
в каком они были начаты;
отдавать предпочтение более коротким процессам;
предоставлять всем пользователям (задачам пользователей)
одинаковые услуги, в том числе и одинаковое время ожидания.
На протяжении существования процесса выполнение его потоков
может быть многократно прервано и продолжено.
Переход от выполнения одного потока к другому осуществляется
в результате планирования и диспетчеризации.
Планирование потоков осуществляется на основе информации,
хранящейся в описателях процессов и потоков. При планировании
могут приниматься во внимание приоритет потоков, время их
ожидания в очереди, накопленное время выполнения, интенсивность
обращения к вводу-выводу и др. факторы. ОС планирует выполнение
потоков независимо от того, принадлежат ли они одному или разным
процессам. Под планированием понимают задачу подбора такого
множества процессов, чтобы они как можно меньше конфликтовали
при
выполнении
и
как
можно
эффективнее
использовали
вычислительную систему.
В различных информационных источниках существуют различные
трактовки понятий "планирование" и "диспетчеризация". Так,
некоторые авторы планирование подразделяют на долгосрочное
(глобальное)
и
краткосрочное
(динамическое,
т.е.
текущее
наиболее
эффективное
распределение),
и
последнее
называют
диспетчеризацией.
Согласно
другим
источникам,
под
диспетчеризацией
понимают
реализацию
принятого
на
этапе
планирования решения. Мы будем придерживаться этого варианта.
Планирование включает в себя решение двух задач:
определение момента времени для смены активного потока;
выбор для выполнения потока из очереди готовых потоков.
Существует множество алгоритмов планирования, по-разному
решающих эти задачи. Именно особенности планирования определяют
специфику операционной системы. Рассмотрим их чуть позже.
В большинстве ОС планирование осуществляется динамически,
т.е. решения принимаются во время работы на основании анализа
текущей ситуации. Потоки и процессы появляются в случайные
моменты времени и непредсказуемо завершаются.
Статический тип планирования может быть использован в
специализированных системах, в которых весь набор одновременно
выполняемых
заданий
определен
заранее
(системы
реального
46
времени). Планировщик составляет расписание на основании знаний
о
характеристиках
набора
задач.
Затем
это
расписание
используется операционной системой для диспетчеризации.
Диспетчеризация
заключается
в
реализации
найденного
в
результате планирования решения, т.е. в переключении одного
процесса на другой. Диспетчеризация сводится к следующему:
сохранение контекста текущего потока, который требуется
сменить;
загрузка контекста нового потока, выбранного в результате
планирования;
запуск нового потока на выполнение.
В контексте потока отражены, во-первых, состояние аппаратуры
компьютера в момент прерывания (значение счетчика команд,
содержимое регистров общего назначения, режим работы процессора,
флаги, маски прерываний и др. параметры), во-вторых, параметры
операционной
среды
(ссылки
на
открытые
файлы,
данные
о
незавершенных операциях ввода-вывода, коды ошибок выполняемых
данным потоком системных вызовов и т.п.).
В контексте потока можно выделить часть, общую для всех
потоков данного процесса (ссылки на открытые файлы), и часть,
относящуюся только к данному потоку (содержимое регистров,
счетчик команд, режим процессора). Например, в среде NetWare
различаются три вида контекстов – глобальный контекст (контекст
процесса), контекст группы потоков и контекст отдельного потока.
Соотношение между данными этих контекстов аналогично соотношению
глобальных и локальных переменных в программе. Иерархическая
организация
контекстов
ускоряет
переключение
потоков:
при
переключении с потока одной группы на поток другой группы в
пределах одного процесса глобальный контекст не изменяется, а
меняется
лишь
контекст
группы.
Переключение
глобальных
контекстов происходит только при переходе с потока одного
процесса на поток другого процесса.
1.3 Алгоритмы планирования
С точки зрения решения первой задачи планирования (выбор
момента
времени
для
смены
активного
потока)
алгоритмы
планирования делятся на два больших класса – вытесняющие и
невытесняющие алгоритмы:
невытесняющие – активный поток может выполняться до тех пор,
пока он сам не передаст управление системе, чтобы та выбрала из
очереди другой готовый поток;
вытесняющие – операционная система принимает решение о смене
выполняемого задания и переключает процессор на другой поток.
Основным различием между названными алгоритмами планирования
является степень централизации механизма планирования потоков.
Рассмотрим основные характеристики, достоинства и недостатки
каждого класса алгоритмов.
Невытесняющие
алгоритмы.
Прикладная
программа,
получив
управление от ОС, сама определяет момент завершения очередного
цикла своего выполнения и только затем передает управление ОС с
47
помощью
какого-либо
системного
вызова.
Следовательно,
управление приложением со стороны пользователя теряется на
произвольный период времени. Разработчикам необходимо учитывать
это и создавать приложения так, чтобы они работали как бы
"частями",
периодически
прерываясь
и
передавая
управление
системе,
т.е.
при
разработке
выполняются
еще
и
функции
планировщика.
Достоинства данного подхода:
исключено прерывание потока в неудобный для него момент;
решается проблема одновременного использования данных, т.к.
во
время
каждого
цикла
выполнения
задача
использует
их
монопольно и уверена, что никто другой не сможет их изменить;
более высокая скорость переключения с потока на поток.
Недостатками являются затрудненная разработка программ и
повышенные требования к квалификации программиста, а также
возможность захвата процессора одним потоком при его случайном
или преднамеренном зацикливании.
Примеры:
1. В
операционной системе Windows 3.x разработанные в ней
приложения действовали именно таким образом, и программисты
должны были сами обеспечивать "дружественное" отношение своих
программ
к
другим
задачам
(крайним
проявлением
"недружественности" является зависание приложения, которое
приводит к краху системы).
2. Файл-серверы
NetWare 3.x, 4.x – высокая скорость выполнения
файловых операций. Поток, чтобы не занимать процессор слишком
долго, сам отдает управление с помощью системных вызовов.
Простой
алгоритм
планирования
и
иерархии
контекстов
обуславливает небольшие накладные расходы на диспетчеризацию
потоков, вследствие чего невытесняющий механизм организации
многопоточной работы в этой ОС очень производителен.
Вытесняющие алгоритмы – циклический, или круговой тип
планирования, при котором операционная система сама решает
вопрос о прерывании активного приложения и переключает процессор
с одной задачи на другую в соответствии с тем или иным
критерием. В системе с такими алгоритмами программисту не надо
заботиться
о
том,
что
его
приложение
будет
выполняться
одновременно с другими задачами. В качестве примеров можно
назвать операционные системы UNIX, Windows NT/2000, OS/2.
Алгоритмы этого класса ориентированы на высокопроизводительное
выполнение приложений.
Вытесняющие алгоритмы могут быть основаны на концепции
квантования или на механизме приоритетов.
Алгоритмы,
основанные
на
квантовании.
Каждому
потоку
предоставляется ограниченный непрерывный квант процессорного
времени (его величина не должна быть меньше 1 мс – как правило,
несколько
десятков
мс).
Поток
переводится
из
состояния
выполнения в состояние готовности в случае, если квант исчерпан.
Кванты могут быть одинаковыми для всех потоков или различными.
48
При выделении квантов потоку могут использоваться разные
принципы: эти кванты могут быть фиксированной величины или
изменяться в разные периоды жизни потока. Например, для
некоторого конкретного потока первый квант может быть довольно
большим, а каждый следующий выделяемый ему квант может иметь
меньшую длительность (уменьшение до заданных пределов). Таким
образом формируется преимущество для более коротких потоков, а
длительные задачи переходят в фоновый режим. Другой принцип
основан на том факте, что процессы, часто выполняющие операции
ввода-вывода, не полностью реализуют выделяемые им кванты
времени.
Для
компенсации
этой
несправедливости
из
таких
процессов может быть сформирована отдельная очередь, которая
имеет привилегии по отношению к остальным потокам. При выборе
очередного потока на выполнение сначала просматривается эта
очередь, и, только если она пуста, выбирается поток из общей
очереди готовых к выполнению.
Замечание
Эти
алгоритмы
не
используют
никакой
предварительной
информации о задачах. Дифференциация обслуживания в данном
случае базируется на "истории существования" потока в системе.
С точки зрения второй задачи планирования (принцип выбора на
выполнение очередного потока) алгоритмы также могут быть условно
разбиты на классы: бесприоритетные и приоритетные алгоритмы. При
бесприоритетном обслуживании выбор очередной задачи производится
в некотором заранее заданном порядке без учета их относительной
важности и времени обслуживания. При реализации приоритетных
дисциплин некоторым задачам предоставляется преимущественное
право попасть в состояние исполнения.
Теперь
рассмотрим
дисциплины планирования.
некоторые
наиболее
распространенные
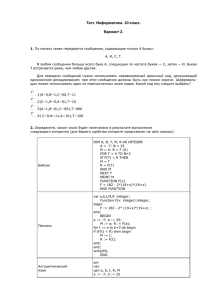
1) Обслуживание в порядке поступления. Выделение процессора
производится по принципу FIFO (First In First Out), т.е. в
порядке
поступления
заявок
на
обслуживание.
Этот
подход
Выполненные задачи
Процессор
Очередь задач, снова готовых к выполнению
Очередь новых задач
Блокирование
Дисциплина
планирования FIFO
позволяет реализовать стратегию "по возможности заканчивать
вычисления в порядке их появления". Те задачи, которые были
заблокированы в процессе выполнения, после перехода в состояние
49
готовности ставятся в очередь перед теми задачами, которые еще
не выполнялись. Таким образом, создается две очереди: одна из
еще не выполнявшихся задач, а другая – из задач, перешедших из
состояния ожидания.
Эта дисциплина реализуется как невытесняющая, когда задачи
освобождают процессор добровольно.
Достоинством
данного
алгоритма
является
его
простота
реализации. Недостатком – при большой загрузке короткие задания
вынуждены ожидать в системе долгое время. Следующий подход
устраняет этот недостаток.
ЛЕКЦИЯ 9 (26.03.04)
2) Кратчайший процесс обслуживается первым. Согласно этому
алгоритму,
следующим
для
выполнения
назначается
поток
с
минимальным оценочным временем, требуемым для окончания его
работы. Здесь оказывается предпочтение потокам, которым осталось
немного времени до их завершения. Благодаря этому уменьшается
количество ожидающих задач в системе. Недостатком является
необходимость заранее знать оценочные времена, что не всегда
возможно. В качестве грубого приближения в некоторых случаях
можно использовать время, затраченное потоком при последнем
получении управления.
Алгоритм относится к разряду невытесняющих бесприоритетных.
Названные алгоритмы могут использоваться для пакетных режимов
работы, когда пользователь не ожидает реакции системы. Для
интерактивных же вычислений нужно прежде всего обеспечить
приемлемое время реакции и равенство в обслуживании для
мультитерминальных
систем.
Для
однопользовательских
систем
желательно, чтобы те программы, с которыми непосредственно
работают, имели лучшее время реакции, чем фоновые задания. Кроме
того, некоторые приложения, выполняясь без непосредственного
участия пользователя, должны тем не менее гарантированно
получать свою долю процессорного времени (например, программа
получения электронной почты). Для решения подобных проблем
используются
приоритетные
методы
обслуживания
и
концепция
квантования.
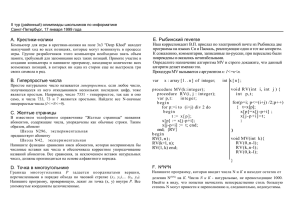
3)
Карусельная
дисциплина,
Процессор
или
круговая
–
RR
(Round
Выполненные задачи
Очередь задач, готовых к выполнению
Дисциплина планирования RR
Новые задачи
Robin).
50
Данная дисциплина относится к вытесняющим алгоритмам и основана
на квантовании. Каждая задача получает процессорное время
порциями – квантами. После окончания кванта времени задача
снимается с процессора и ставится в конец очереди процессов,
готовых к выполнению, а на обслуживание процессором принимается
очередная задача. Для оптимальной работы системы необходимо
правильно выбрать закон, по которому кванты времени выделяются
задачам.
Величина кванта выбирается как компромисс между приемлемым
временем реакции системы на запросы пользователей (с тем, чтобы
их простейшие запросы не вызывали длительного ожидания) и
накладными расходами на частую смену задач. При прерываниях ОС
должна сохранить достаточно большой объем информации о текущем
процессе,
поставить
дескриптор
снятой
задачи
в
очередь,
загрузить контекст новой задачи. При малой величине кванта
времени
и
частых
переключениях
относительная
доля
таких
накладных
расходов
станет
большой,
и
это
ухудшит
производительность системы в целом. При большой величина кванта
времени и увеличении очереди готовых задач реакция системы
станет плохой.
В некоторых ОС есть возможность указывать в явном виде
величину кванта времени или допустимый диапазон его значений.
Например, в OS/2 в файле CONFIG.SYS с помощью оператора
TIMESLICE указывается минимальное и максимальное значения для
кванта времени: TIMESLICE=32,256 указывает, что квант возможно
изменять в пределах от 32 до 256 миллисекунд.
Данная дисциплина обслуживания является одной из самых
распространенных. В некоторых случаях, когда ОС не поддерживает
в явном виде дисциплину карусельного планирования, такое
обслуживание
можно
организовать
искусственно.
Например,
в
некоторых
ОСРВ
используется
планирование
с
абсолютными
приоритетами, а при равенстве приоритетов действует принцип
очередности. Т.е., снять задачу с выполнения может только задача
с более высоким приоритетом. При необходимости организовать
обслуживание равномерно и равноправно, т.е. чтобы все задания
получали одинаковые кванты времени, системный оператор может сам
реализовать такое обслуживание. Для этого достаточно всем
пользовательским задачам присвоить одинаковые приоритеты и
создать одну высокоприоритетную задачу, которая не должна ничего
делать, кроме как планироваться на выполнение по таймеру через
указанные интервалы времени. Эта задача будет только снимать с
выполнения текущее приложение, оно переместится в конец очереди,
а сама задача тут же покинет процессор и уступит его следующему
в очереди процессу.
В простейшей реализации карусельная дисциплина обслуживания
предполагает, что все задания имеют одинаковый приоритет. Если
же необходимо ввести механизм приоритетного обслуживания, обычно
организуют несколько очередей, в зависимости от приоритетов, и к
обслуживанию менее приоритетной очереди переходят только в том
случае, когда более приоритетная очередь пуста. По такому
алгоритму выполняется планирование в системах OS/2 и Windows NT.
4)
Планирование согласно приоритетам.
51
Важная концепция, лежащая в основе многих вытесняющих
алгоритмов – это приоритетное обслуживание. Такие алгоритмы
используют информацию, находящуюся в описателе потока – его
приоритет. В разных системах приоритет определяется по-разному.
В одних системах наивысшим значением приоритета может считаться
его численно наибольшее значение, в других – наоборот, наивысшим
приоритетом считается нулевой.
Как правило, приоритет потока непосредственно связан с
приоритетом процесса, в рамках которого выполняется данный
поток. Приоритет процесса назначается операционной системой при
его создании, при этом учитывается, является ли процесс
системным
или
прикладным,
каков
статус
пользователя,
запустившего процесс, было ли явное указание пользователя на
присвоение
процессу
определенного
приоритета.
Значение
приоритета включается в описатель процесса и используется при
назначении приоритета его потокам. Если поток инициирован не по
команде пользователя, а в результате выполнения системного
вызова другим потоком, тогда для назначения ему приоритета ОС
должна учитывать параметры системного вызова.
При планировании обслуживания программ согласно описанным
ранее алгоритмам может возникнуть ситуация, когда некоторые
задачи контроля или управления не смогут быть реализованы в
течение
длительного
промежутка
времени
из-за
возрастания
нагрузки в системе (особенно в ОСРВ). При этом последствия из-за
несвоевременного выполнения таких задач могут быть серьезнее,
чем из-за невыполнения каких-то программ с более высоким
приоритетом. В таком случае было бы целесообразно временно
изменить приоритет "аварийных" задач (у которых истекает
отпущенное для них время обработки), а после выполнения
восстановить прежнее значение. Введение механизмов динамического
изменения
приоритетов
позволяет
реализовать
более
быструю
реакцию системы на короткие запросы пользователей (что важно при
интерактивной работе), но при этом гарантировать выполнение
любых запросов.
Таким
образом,
приоритет
может
быть
статическим
(фиксированным)
или
динамическим
(изменяющимся
системой
в
зависимости от ситуации в ней). Так называемый базовый приоритет
потока непосредственно зависит от базового приоритета процесса,
его породившего. В некоторых случаях система может повышать
приоритет потока (причем в различной степени), например, если
квант отведенного ему процессорного времени не был использован
полностью, или понижать приоритет в противном случае. Например,
ОС повышает приоритет в большей степени потокам, ожидающим ввода
с клавиатуры, и в меньшей степени – потокам, выполняющим
операции с диском. В некоторых системах, использующих механизм
динамических приоритетов, для изменения приоритета используются
достаточно сложные формулы, в которых участвуют значения базовых
приоритетов, степень загрузки вычислительной системы, начальное
значение приоритета, заданное пользователем, и т.п.
Пример
Рассмотрим схему назначения потоков, принятую в Windows NT. В
системе определено 32 уровня приоритетов и два класса потоков –
52
потоки реального времени и потоки с переменными приоритетами.
Диапазон от 1 до 15 включительно отведен для потоков с
переменными приоритетами, а от 16 до 31 – для более критичных
ко
времени
потоков
реального
времени
(приоритет
0
зарезервирован для системных целей). При создании процесса он в
зависимости от класса получает базовый приоритет в верхней или
нижней части диапазона. Этот базовый приоритет процесса может
быть в дальнейшем повышен или понижен операционной системой.
Поток первоначально получает значение базового приоритета из
диапазона базового приоритета процесса, в котором он был
создан. Пусть, например, значение базового приоритета процесса
равно k. Тогда все потоки данного процесса получат базовые
приоритеты из диапазона [k-2,k+2].
Существуют две разновидности приоритетного планирования:
обслуживание с относительными приоритетами и обслуживание с
абсолютными приоритетами. В обоих случаях выбор потока на
выполнение осуществляется одинаково – выбирается поток, имеющий
наивысший
приоритет,
а
момент
смены
активного
потока
определяется по-разному. В системе с относительными приоритетами
активный поток выполняется до тех пор, пока он сам не покинет
процессор (перейдет в состояние ожидания, или произойдет ошибка,
или поток завершится). В системе с абсолютными приоритетами
прерывание активного потока, кроме указанных причин, происходит
еще и в случае, если в очереди готовых потоков появляется поток
с более высоким приоритетом, чем активный. Тогда выполняемый
поток прерывается и переводится в состояние готовности.
В системе с планированием на основе относительных приоритетов
минимизируются затраты на переключение, но одна задача может
занимать процессор долгое время. Для систем разделения времени и
реального времени такой режим обслуживания не подходит, а вот в
системах пакетной обработки (например, OS/360) он используется
широко. Планирование с абсолютными приоритетами подходит для
систем управления объектами, в которых важна быстрая реакция на
события.
Смешанный тип планирования используется во многих ОС:
алгоритмы планирования на основе приоритетов сочетаются с
концепцией квантования.
Примеры
Рассмотрим примеры операционных систем, в которых квантование
сочетается с динамическими абсолютными приоритетами.
1. Именно так организовано планирование в системе Windows NT. На
выполнение выбирается поток с наивысшим приоритетом, ему
выделяется квант времени. Если во время его выполнения в
очереди готовых появляется поток с более высоким приоритетом,
то
он
вытесняет
выполняемый
поток.
Вытесненный
поток
возвращается в очередь готовых, причем ставится впереди всех
остальных потоков, имеющих такой же приоритет.
2. В системе OS/2 планирование основано на тех же принципах. При
этом на множестве потоков определены приоритетные классы –
критический, серверный, стандартный и остаточный, в каждом из
которых имеется 32 приоритетных уровня. Потоки критического
53
класса относятся к задачам реального времени и имеют наивысший
приоритет (системные потоки, управляющие сетью), следующий по
приоритетности класс предназначен для потоков, обслуживающих
серверные приложения. Потоки обычных приложений относятся к
стандартному классу (еще его называют регулярным), самый низкий
приоритет у потоков остаточного класса (например, программа
проверки электронной почты или поток вывода на экран заставки).
Поток из менее приоритетного класса не может быть выбран на
выполнение, пока очередь более приоритетного класса не пуста.
Внутри класса потоки также выбираются по приоритетам, а потоки
с одинаковым приоритетом обслуживаются в циклическом порядке.
Переход от одного потока к другому происходит либо по окончании
отведенного
ему
кванта
процессорного
времени,
либо
по
системному прерыванию, передающему управление задаче с более
высоким приоритетом (обеспечивает более быструю реакцию на
события).
Операционная система сама изменяет приоритет выполняющихся
задач. Например, она повышает приоритет "забытых" задач
следующим образом. Если задача не получает управление в течение
достаточно
долгого
промежутка
времени
(который
задается
специальным оператором MAXWAIT в файле CONFIG.SYS), ей временно
присваивается наивысший уровень приоритета (?своего класса?)
(правда, не превышающий критический). После выполнения этого
приложения в течение одного кванта времени ему возвращается
прежнее значение приоритета. Этот механизм позволяет задачам с
остаточным приоритетом даже в сильно загруженных системах
поступать на выполнение хотя бы в краткие интервалы времени. В
противном случае они могли бы вообще никогда не получить
управления.
3. В ОС UNIX System V Release 4 (SVR4) понятие "поток"
отсутствует, и планирование осуществляется на уровне процессов
в
соответствии
с
алгоритмом
вытесняющей
многозадачности,
основанной на использовании приоритетов и квантовании.
Каждый процесс относится к одному из трех приоритетных
классов: реального времени, разделения времени или системных
процессов. Назначение и обработка приоритетов выполняются для
разных
классов
по-разному.
Процессы
системного
класса,
зарезервированные для ядра, имеют фиксированные приоритеты,
назначаемые ядром и никогда не изменяющиеся. Процессы реального
времени также используют стратегию фиксированных приоритетов,
но
пользователь
может
их
изменять.
Для
каждого
уровня
приоритета
по
умолчанию
имеется
своя
величина
кванта
процессорного времени. Процессы разделения времени используют
стратегию
динамических
приоритетов.
Величина
приоритета
вычисляется пропорционально значениям двух составляющих –
пользовательской части и системной части. Пользовательская
часть может быть изменена администратором или владельцем
процесса, причем последним – только в сторону его снижения.
Системная
составляющая
позволяет
планировщику
управлять
процессами в зависимости от того, как долго они занимают
процессор, не уходя в состояние ожидания. У тех процессов,
которые потребляют большие интервалы процессорного времени, не
уходя в состояние ожидания, приоритет снижается, но выделяется
54
больший квант времени. Процессам, часто уходящим в состояние
ожидания после короткого периода использования процессорного
времени, приоритет повышается.
Планирование в системах реального времени. Планирование здесь
имеет особое значение. Поскольку выполнение процессов привязано
к внешним условиям, система должна реагировать на сигналы
управляемого объекта в пределах заданных временных ограничений.
Системы реального времени подразделяются на жесткие (hard) и
мягкие (soft) в зависимости от степени критичности условий
работы.
Система
называется
жесткой,
если
последствия
несоблюдения временных ограничений катастрофичны – например,
система управления полетами или атомной электростанцией. Если же
последствия нарушения временных ограничений не столь серьезны,
то система называется мягкой, например, система резервирования
билетов.
В
жестких
системах
время
выполнения
процессов
четко
ограничено директивными сроками. Директивные сроки – это два
числа Tb и Tf. Первое обозначает время, раньше которого процесс
не может начать работу, а второе – время, к которому он должен
ее завершить. В таких системах время завершения выполнения
каждой из критических задач должно быть гарантировано для всех
возможных сценариев работы системы. Такие гарантии могут быть
даны
либо
в
результате
исчерпывающего
тестирования
всех
возможных сценариев поведения управляемого объекта и управляющих
программ, либо в результате построения статического расписания,
либо
в
результате
выбора
математически
обоснованного
динамического
алгоритма
планирования.
Точные
критерии
возможности существования расписания являются очень сложными в
вычислительном отношении. В мягких системах применяются менее
затратные способы планирования.
В рассмотренных выше системах UNIX System V Release 4, OS/2 и
Windows NT имеется приоритетный класс реального времени. Для
потоков этого класса обеспечено только предпочтение в скорости
обслуживания, но не гарантировано выполнение заданных временных
ограничений. Поэтому эти ОС могут быть основой для построения
лишь мягких систем реального времени, но непригодны для жестких
систем.
За последние годы появился ряд интересных подходов к
планированию,
основанных
на
дополнительной
информации
о
заданиях, например:
–
Время готовности – время, когда задание становится доступным
для выполнения. В повторяющемся или периодическом задании время
готовности
представляет
собой
последовательность
заранее
известных времен.
–
Предельное время начала выполнения – время, когда должно
начаться выполнение задания.
–
Предельное время завершения выполнения – время, когда задание
должно
быть
полностью
завершено.
Обычно
задания
имеют
ограничение по предельному времени начала либо завершения
выполнения, но не оба одновременно.
55
–
Время выполнения – время, требующееся заданию для его
полного выполнения. Иногда это время известно, иногда система
сама оценивает среднее значение.
–
Требования к ресурсам – множество ресурсов, требующихся
заданию для его выполнения.
–
Приоритет – мера относительной важности задания. Жесткие
задания реального времени имеют абсолютный приоритет и приводят
к сбою системы при нарушении временных ограничений этих заданий.
–
Структура подзадач. Задача может быть разбита на обязательные
и необязательные подзадачи, при этом жесткие предельные сроки
имеют только обязательные подзадачи.
Для заданной стратегии вытеснения и использования либо
предельного времени начала выполнения, либо предельного времени
завершения применение планирования, выбирающего для выполнения
задание с наиболее ранним предельным временем, позволяет
минимизировать
долю
заданий
с
нарушенными
временными
ограничениями.
Если определяется предельное время начала работы, то
целесообразно применять невытесняющее планирование. В таком
случае желательно, чтобы задания после завершения обязательной
или критической части самостоятельно блокировались и позволяли
выполняться другим заданиям с предельным временем начала работы.
Для системы с предельным временем завершения больше подходит
вытесняющая стратегия.
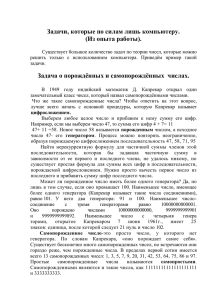
Рассмотрим пример планирования периодических заданий с
предельным временем завершения.
Пусть система собирает и обрабатывает данные от двух
датчиков, A и B. Сроки сбора данных от датчика A – каждые 20 мс,
от датчика B – каждые 50 мс. Процесс снятия данных, включая
накладные расходы ОС, занимает: для датчика A – 10 мс, для
датчика B – 25 мс.
B1
A1
A:
B:
A1
A2
A2
A3
A3
B1
0
предельные сроки
A4
A4
B2
B2
A5
A5
t
10 20 30 40 50 60 70 80 90 100
Время поступления, выполнения и предельное время
Предположим, что используется схема с приоритетами. В случае
более высокого приоритета A задание B получит только 20 мс
процессорного времени в двух смежных интервалах по 10 мс, после
этого будет достигнуто его предельное время выполнения, а
задание еще не выполнится (см. иллюстрацию ниже). Если более
высокий приритет назначить заданию B, то (что очевидно) в срок
не успеет выполниться задание A.
B1 – опоздание
A:
B:
A1
A2
B1
A3
B1
A4
B2
A5
B2
t
56
В данной ситуации наиболее целесообразно использовать
вытесняющее планирование с предельным временем завершения. В
момент времени t=0 поступают задания A1 и B1. Поскольку
предельный срок A1 наступает раньше, сначала выполняется A1.
После его завершения начинает выполняться B1, но после появления
в момент t=20 задания A2 его предельное время завершения
оказывается меньшим, поэтому выполнение B1 прерывается и не
продолжается, пока не выполнится A2 (к моменту t=30). В момент
времени t=40 появляется очередное задание A3, но его предельное
время завершения больше, чем у выполняющегося B1, поэтому
сначала оно завершится (в момент t=45), и только затем начнет
выполняться A3. Данная схема проиллюстрирована на рисунке.
B1
A1
A2
предельные сроки
A3
B2
A4
A5
t
A:
B:
A1
A2
B1
B1
0
10
20
A3
30
A4
B2
40
50
60
A5
B2
70
80
90
100
ЛЕКЦИЯ 10 (31.03.04)
§2 Организация параллельных взаимодействующих
процессов
2.1 Взаимодействие процессов
Основной особенностью мультипрограммных вычислительных систем
является то, что в их среде параллельно развивается несколько
(последовательных) вычислительных процессов. С точки зрения
внешнего наблюдателя эти процессы выполняются одновременно,
поэтому будем считать их работающими параллельно независимо от
того, реально они используют в некоторый момент времени
различные процессоры, каналы, устройства или разделяют одни и те
же ресурсы во времени. Любая мультипрограммная ОС вместе с
параллельно выполняющимися в ней задачами пользователей может
быть
логически
описана
как
совокупность
последовательных
процессов. Эти процессы, с одной стороны, состязаются за
использование ресурсов, переходя из одного состояния в другое, а
с другой – действуют почти независимо друг от друга, но образуют
систему вследствие установления всевозможных связей между ними
путем пересылки сообщений и синхронизирующих сигналов.
Два параллельных
взаимодействующими.
процесса
могут
быть
независимыми
или
Независимыми являются процессы, множества переменных которых
не пересекаются. Под переменными в этом случае понимают файлы
данных, а также области оперативной памяти, сопоставленные
определенным в программе переменным. Независимые процессы не
влияют на результаты работы друг друга, т.к. не могут изменить
значение переменных другого независимого процесса. Они могут
57
только являться причиной задержек исполнения других процессов,
т.к. вынуждены разделять ресурсы системы.
Взаимодействующие процессы совместно используют некоторые
общие переменные, и выполнение одного процесса может повлиять на
выполнение другого.
Взаимодействовать могут либо конкурирующие процессы, либо
совместно выполняющие общую работу. Конкурирующие процессы на
первый взгляд действуют относительно независимо, но имеют доступ
к общим переменным. Процессы, работа которых построена на обмене
данными (результат вычислений одного процесса в явном виде
передается другому), называют сотрудничающими.
Многие
ресурсы
системы
могут
использоваться
совместно
несколькими процессами, но к разделяемым ресурсам в каждый
момент времени может иметь доступ только один процесс. Ресурсы,
которые не допускают одновременного использования несколькими
процессами, называют
критическими. В системе должна быть
предусмотрена защита от одновременного доступа процессов к
критическим
ресурсам,
иначе
в
ней
могут
возникать
непрогнозируемые и трудно обнаруживаемые ошибки.
В мультипрограммной системе потоки и процессы протекают
асинхронно, с различными скоростями, на которые могут влиять еще
и решения планировщиков относительно других процессов. Поэтому
влияние взаимодействующих процессов друг на друга невозможно
спрогнозировать. Чтобы предотвратить порчу общих данных и
исключить
взаимную
блокировку,
потокам
необходимо
синхронизировать
свою
работу.
Синхронизация
заключается
в
согласовании скоростей потоков путем приостановки потока до
наступления некоторого события и последующей его активизации,
когда это событие произойдет.
Взаимодействие сотрудничающих потоков удобно рассматривать в
схеме
"производитель–потребитель":
Поток-получатель
должен
обращаться за данными только после того, как они помещены в
буфер потоком-отправителем. Если же поток-получатель обратился
за данными раньше, то он должен быть приостановлен до момента
поступления данных.
При отсутствии синхронизации возможны следующие проблемы:
Возникновение гонок. Гонками называется такая ситуация, когда
два или более потоков обрабатывают разделяемые данные и конечный
результат зависит от соотношения скоростей потоков.
Взаимные блокировки, или тупики (дедлоки, клинчи – разные
термины для обозначения одного события). Тупик – это состояние,
когда несколько процессов ждут событий, которые могут быть
вызваны только одним из этих процессов. Так как все процессы
находятся в состоянии ожидания, то эти события не произойдут
никогда, следовательно, без вмешательства системы ожидание будет
бесконечным.
Например, процесс P1 занимает ресурс X и для дальнейшей
работы нуждается в ресурсе Y, а процесс P2 занимает ресурс Y и
для дальнейшей работы нуждается в ресурсе X. Возникает
ситуация тупика (взаимной блокировки), поскольку ни один из
процессов не может завершить работу из-за нехватки ресурса,
который, в свою очередь, никогда не освободится.
58
Существует
ряд
механизмов
синхронизации
потоков
и
процессов. Они могут образовывать иерархию, когда на основе
более простых средств строятся более сложные, а также могут быть
функционально
специализированными,
например,
средства
для
синхронизации
потоков
одного
процесса,
средства
для
синхронизации потоков разных процессов при обмене данными и т.п.
Для синхронизации потоков прикладных программ программист может
использовать
как
средства
операционной
системы,
так
и
собственные приемы синхронизации.
Механизмы синхронизации различаются в зависимости от того,
относятся они к потокам одного или разных процессов. Для
синхронизации
потоков
одного
процесса
можно
использовать
глобальные
блокирующие
переменные,
которые
позволяют
контролировать работу потоков в критической секции (мониторы,
семафоры). Для потоков разных процессов ОС использует системные
семафоры, события, сигналы, таймеры и пр. В распределенных
системах, состоящих из нескольких процессоров, синхронизация
может быть реализована только посредством передачи сообщений.
Рассмотрим несколько более подробно некоторые названные средства
синхронизации и связанные с ними понятия.
2.2 Критическая секция. Взаимоисключение
Критическая
секция
–
это
часть
программы,
результат
выполнения
которой
может
непредсказуемо
меняться,
если
переменные, относящиеся к этой части программы, изменяются
другими потоками, когда выполнение этой части еще не завершено.
Критическая
секция
всегда
определяется
по
отношению
к
критическим данным, при несогласованном изменении которых могут
возникнуть нежелательные эффекты.
Общие данные, разделяемые несколькими потоками, удобно
описывать
как
ресурс,
а
обновление
данных
соответствует
распределению или освобождению элементов ресурса.
Рассмотрим примеры.
1. Пусть два потока p1 и p2 асинхронно увеличивают значение
общей
целочисленной
переменной
x,
которая
представляет
количество общих единиц ресурса:
p1: ... ; x:=x+1; ... ; ...
p2: ... ; x:=x+1; ... ; ...
Если бы потоки выполнялись на разных процессорах C1 и C2,
имеющих внутренние регистры R1 и R2 и разделяемую основную
память, то могла бы возникнуть любая из следующих двух
последовательностей:
(1)p1: R1:=x; R1:=R1+1; x:=R1; ...
p2: ... ; R2:=x; R2:=R2+1; x:=R2; ...
t0
(2)p1: R1:=x; R1:=R1+1; x:=R1; ...
p2:
t1
... ; R2:=x; R2:=R2+1; x:=R2; ...
Пусть x содержит значение V в момент времени t0. Тогда, если
бы
выполнение
потоков
p1
и
p2
происходило,
как
в
59
последовательности (1), то в момент t1 переменная x содержала
бы значение V+1 , если же – как в последовательности (2), то
переменная x содержала бы значение V+2. Точно такие же
результаты были бы получены, если бы потоки p1 и p1 разделяли
во времени единственный процессор с переключением управления
между
потоками
посредством
прерываний.
В
этом
примере
проиллюстрирован эффект гонок.
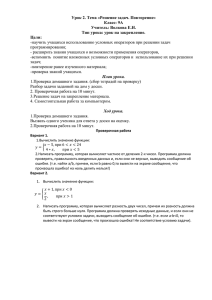
2. Рассмотрим другой пример – задачу ведения базы данных
клиентов некоторого предприятия. Каждому клиенту отводится
отдельная запись в базе данных, в которой среди прочих полей
имеются поля ЗАКАЗ и ОПЛАТА. Программа, ведущая базу данных,
оформлена как единый процесс, имеющий несколько потоков, в том
числе поток A, который заносит в базу информацию о заказах,
поступивших от клиентов, и поток B, который фиксирует в базе
сведения об оплате клиентами выставленных счетов. Оба эти
потока совместно работают над общим файлом базы данных,
используя однотипные алгоритмы, включающие три шага:
Считать из файла базы данных в буфер запись о клиенте с
заданным идентификатором;
Внести новое значение в поле ЗАКАЗ (для потока A) или ОПЛАТА
(для потока B);
Вернуть модифицированную запись в файл базы данных.
Обозначим соответствующие шаги для потока A как A1, A2, A3, а
для потока B – B1, B2, B3. Предположим, что тому и другому
потоку потребовалось изменить сведения о заказе и оплате
одного и того же клиента N. В некоторый момент времени поток A
считывает
соответствующую
клиенту
запись
в
буфер
и
поток A
A1
считать запись
в буфер
A2
внести изменения
в поле "заказ"
A3
сохранить запись
в файле
критическая
секция
поток B
B1
считать запись
в буфер
B2
внести изменения
в поле "оплата"
B3
сохранить запись
в файле
заказ
оплата
запись о
клиенте N
критическая
секция
Возникновение гонок при доступе к разделяемым данным
60
модифицирует значение поля ЗАКАЗ (шаги A1, A2), но внести эту
запись в базу (выполнить шаг A3) не успевает, т.к. его
выполнение
прерывается,
например,
вследствие
завершения
отведенного ему кванта времени. Когда подходит очередь потока
B, он тоже успевает только считать запись в буфер и произвести
изменения в поле ОПЛАТА (шаги B1, B2), а внести измененную
запись (шаг B3) в базу не успевает.
В такой ситуации окончательный результат, занесенный в базу,
будет зависеть от того, какой из потоков – A или B – первым
получит возможность закончить свою работу. Но как в том, так и
в другом случае часть информации окажется потерянной, хотя все
исправления были успешно внесены. Сохранится только изменение,
сделанное потоком, который последним занесет запись о клиенте
в базу данных. Здесь также имеет место эффект гонок.
В данном примере критической секцией потока A являются A1,
A2, A3, а потока B – B1, B2, B3.
Для исключения описанного эффекта по отношению к критическим
данным необходимо обеспечить, чтобы в каждый момент времени в
критической секции, связанной с этими данными, находился только
один поток. При этом неважно, в активном или приостановленном
состоянии
он
находится.
Этот
прием
называют
взаимным
исключением. Следует отметить, что вне критических секций потоки
должны иметь возможность работать параллельно.
Более точно проблема формулируется так.
Пусть имеется мультипрограммная система с общей памятью.
Каждая
из
программ,
выполняемых
процессором,
содержит
критическую секцию, в которой организован доступ к общим данным.
Программы
выполняются
циклически.
Необходимо
так
запрограммировать доступ к общей памяти, чтобы в любой момент
только одна из программ находилась в своей критической секции.
Относительно системы сделаны следующие предположения:
1) Считывание из общей памяти и запись в нее – неделимые
операции. Одновременные обращения (на запись или на считывание)
к одной и той же ячейке памяти более чем одного процесса
приведут к последовательным обращениям в произвольном порядке.
2) Критические
секции
не
могут
иметь
связанных
с
ними
приоритетов.
3) Относительные скорости процессов неизвестны.
4) Программа может останавливаться вне критической секции (КС).
Требования к критическим секциям:
в любой момент времени только один процесс может находиться в
своей критической секции;
ни один процесс не должен находиться в своей критической
секции бесконечно долго;
ни один процесс не должен ждать бесконечно долго входа в свой
критический интервал;
если процесс, находящийся в своем критическом интервале,
завершается либо естественным, либо аварийным путем, то режим
взаимоисключения должен быть отменен, с тем, чтобы другие
процессы получили возможность входить в свои критические
секции.
61
ЛЕКЦИЯ 11 (2/04/04)
2.3 Способы реализации взаимного исключения
Будем предполагать, что система циклических потоков для
проблемы критической секции имеет следующие программные формы:
parbegin
P1: while true do
Begin CS1; program_1; end;
P2: while true do
Begin CS2; program_2; end;
...
Pn: while true do
Begin CSn; program_n; end;
parend
Здесь
управляющая
конструкция
parbegin
...
parend
используется
для
указания
на
то,
что
часть
программы,
заключенная
между
этими
операторами,
должна
выполняться
параллельно. Через идентификатор
CS с номером обозначены
критические секции каждого потока, program_1, program_2, …,
program_n
представляют собой те части потоков, которые не
обращаются к общим данным и могут работать параллельно без каких
бы то ни было ограничений.
Самый простой и самый неэффективный способ обеспечения
взаимного исключения состоит в том, что ОС позволяет потоку
запрещать любые прерывания на время его нахождения в критической
секции. Но доверять управление системой пользовательскому потоку
опасно – он может надолго занять процессор, а при крахе потока в
критической секции крах потерпит вся система, т.к. прерывания
никогда не будут разрешены.
Пусть проблема ограничена двумя потоками. Нашей целью
является недопущение одновременного вхождения обоих потоков в их
критические секции, т.е. взаимное исключение. В то же время
должны быть устранены два возможных типа блокировки:
1) Поток, нормально работающий вне своей КС, не должен
блокировать другой поток при вхождении последнего в свою КС.
2) Два потока, готовые войти в свои КС, не должны откладывать
неопределенно долго решение вопроса о том, который из них войдет
в свою КС первым.
Рассмотрим различные методы решения данной проблемы и покажем
ловушки, которые при этом возникают.
62
1) Проблема решается легко, если потребовать, чтобы потоки
входили в свои КС попеременно. Одна общая переменная может
хранить указатель на то, чья очередь войти в КС. Рассмотрим
программную реализацию этого варианта (назовем его вариант 1).
Здесь переменная turn указывает то, какой поток должен
входить в критическую секцию. Каждый из потоков работает в
бесконечном цикле.
Program Variant1;
Var turn : integer; {общая переменная}
Procedure process_1;
Begin
While true Do
Begin
While turn=2 Do;
{активное ожидание}
CS1;
turn:=2;
program_1;
End;
End;
Procedure process_2;
Begin
While true Do
Begin
While turn=1 Do;
CS2;
turn:=1;
program_2;
End;
End;
Begin
turn:=1;
Parbegin
process_1;
process_2;
Parend
End.
{активное ожидание}
{процессы работают параллельно}
Возможные неприятности: если первый из потоков гораздо медленнее
другого, такое решение будет неэффективным. Может возникнуть
ситуация, когда поток 2, выполнив работу в своей КС, передаст
очередь первому потоку, затем выполнит действия вне своей КС и
снова начнет на нее претендовать, а тот еще даже не соберется
заходить в КС. Тем самым он блокирует второй поток по первому
типу, хотя программа и не может оказаться в состоянии полного
тупика. Если же один из процессов завершится раньше другого, то
второй вообще окажется не в состоянии продолжить выполнение. В
рассмотренном примере мы имеем дело с жесткой синхронизацией.
2) Во второй версии программы делается попытка устранить
указанные недостатки путем введения двух общих переменных
CS1_in, CS2_in – флагов, которые будут указывать на то,
63
находится ли каждый поток внутри своей критической секции. При
такой организации более быстрый поток может несколько раз подряд
войти в свой критический интервал, если другому потоку это пока
не нужно. Рассмотрим текст программы.
Program Variant2;
Var CS1_in, CS2_in: Boolean;
Procedure process_1;
Begin
While true Do
Begin
While CS2_in Do;
{активное ожидание}
CS1_in:=true; CS1; CS1_in:=false;
program_1;
End;
End;
Procedure process_2;
Begin
While true Do
Begin
While CS1_in Do;
CS2_in:=true; CS2;
program_2;
End;
End;
{активное ожидание}
CS2_in:=false;
Begin
CS1_in:=false;
CS2_in:=false;
Parbegin
process_1;
process_2;
Parend
End.
В данном варианте process_1 остается в состоянии активного
ожидания до тех пор, пока
CS2_in
имеет значение "истина".
Когда process_2 выйдет из своего критического участка, он
выполняет собственный код "выход взаимоисключения", устанавливая
для переменной CS2_in значение "ложь". После этого process_1
устанавливает для переменной CS1_in значение "истина" и входит в
свой критический участок. Недостатки предыдущего варианта здесь
устранены, взаимное блокирование теперь невозможно, но зато оба
процесса могут оба одновременно начать выполнять свои входные
последовательности взаимоисключения.
Пусть первый процесс проверил переменную CS2_in и обнаружил,
что она имеет значение "ложь", но изменить значение своей
переменной CS1_in не успел, в то время как второй процесс
проделал то же самое. Тогда в результате выполненных проверок
они оба одновременно войдут в свои критические интервалы, так
что программа данной версии не гарантирует взаимного исключения.
Существует еще ряд вариантов взаимоисключения, но все они не
свободны
от
недостатков.
Рассмотрим
алгоритм
реализации
взаимоисключения, предложенный Деккером. Он не требует никаких
специальных аппаратно-реализованных команд и позволяет избежать
64
недостатков рассмотренных алгоритмов.
В
этом
алгоритме
каждому
из
процессов
соответствует
логическая переменная, принимающая значение "истина", если этот
процесс претендует на вход в критический интервал. Переменная
turn принимает значения, соответствующие номеру выбранного на
выполнение процесса.
Program Variant_Dekker;
Var turn : 1,2;
p1_wants_to_come, p2_wants_to_come : Boolean;
Procedure process_1;
Begin
While true Do
Begin
p1_wants_to_come:=true;
{претендует на вход в КС}
While p2_wants_to_come Do {второй тоже}
If turn=2 Then
Begin
p1_wants_to_come:=false; {отказ от входа в КС}
While turn=2 Do;
{активное ожидание}
p1_wants_to_come:=true; {снова претендует на КС}
End
CS1;
turn:=2;
p1_wants_to_come:=false;
{отказ от входа в КС}
program_1;
End;
End;
Procedure process_2;
Begin
While true Do
Begin
p2_wants_to_come:=true;
{претендует на вход в КС}
While p1_wants_to_come Do {второй тоже}
If turn=1 Then
Begin
p2_wants_to_come:=false; {отказ от входа в КС}
While turn=1 Do;
{активное ожидание}
p2_wants_to_come:=true; {снова претендует на КС}
End
CS2;
turn:=1;
p2_wants_to_come:=false;
{отказ от входа в КС}
program_2;
End;
End;
Begin
p1_wants_to_come:=false;
p2_wants_to_come:=false;
turn:=1;
Parbegin
process_1; process_2;
Parend
End.
65
Рассмотрим, как работает такой вариант. Первый процесс
сообщает
о
своем
желании
войти
в
критическую
секцию,
устанавливая
свой
флаг
(p1_wants_to_come:=true).
Затем
он
переходит к циклу, в котором проверяет, не хочет ли и другой
процесс войти в свою критическую секцию, т.е. каково значение
переменной p2_wants_to_come. Если нет (переменная имеет значение
"ложь"), то он пропускает тело цикла ожидания и успешно входит в
свою критическую секцию. Если же первый процесс обнаруживает,
что флаг второго процесса тоже установлен, то он входит в цикл
ожидания. Здесь он проверяет, какой процесс выбран – анализирует
значение переменной turn. Если turn=1, т.е. его очередь
выполняться, он пропускает тело своего цикла и снова выполняет
цикл проверки в ожидании того момента, когда второй процесс
сбросит свой флаг. Если же выбран второй процесс (turn=2), то
первый процесс сбрасывает свой флаг и блокируется в цикле
ожидания, пока избранным остается второй процесс. Сбрасыванием
своего флага он дает возможность второму процессу войти в свой
критический интервал.
Со временем второй процесс выйдет из критической секции и
выполнит свой код "выход взаимоисключения" – отдаст приоритет
первому процессу и сбросит свой флаг. Теперь у первого процесса
появляется возможность выйти из внутреннего цикла ожидания и
снова установить собственный флаг. Затем он выполняет внешний
цикл проверки. Если флаг второго процесса по-прежнему сброшен,
первый успешно входит в свою критическую секцию. Если же второй
процесс успел снова выразить желание попасть в критическую
секцию и поднял свой флаг, то первому придется войти в тело
внешнего цикла проверки, убедиться в своем преимущественном
праве на выполнение и подождать, пока второй процесс откажется
от входа и сбросит флаг.
Предложенный алгоритм представляет собой программное решение
проблемы
взаимоисключения.
В
нем
решены
как
проблема
взаимодействия потоков с разными скоростями, так и проблемы
бесконечного откладывания и взаимного выполнения. Существуют и
способы аппаратного решения
Недостатком алгоритма Деккера является то, что во время
нахождения одного из процессов в критической секции, другой
впустую циклится и проверяет общие переменные, тем самым вызывая
общее замедление системы, не выполняя при этом никакой полезной
работы.
ЛЕКЦИЯ 12 (9/04/04)
2.4 Семафоры и их применение
Понятия, относящиеся к проблеме взаимоисключения, Дейкстра
обобщил в своей концепции семафоров. Семафор – это переменная
специального типа, которая доступна параллельным процессам для
проведения
над
ней
только
двух
операций:
"закрытия"
и
"открытия", названных соответственно P- и V-операциями. Значение
семафора можно опрашивать и менять только при помощи примитивов
P и V и операции инициализации. Семафоры могут быть двоичными
(принимать значения только 0 или 1) или считающими (принимать
целые неотрицательные значения). Операции P и V неделимы в своем
66
выполнении и взаимно исключают друг друга. Примитивы P и V
значительно упростили синхронизацию процессов.
Семафорный механизм работает по схеме, в которой сначала
исследуется состояние критического ресурса, идентифицируемое
значением семафора, а затем уже осуществляется допуск к
критическому ресурсу или отказ от него на некоторое время. При
отказе доступа к критическому ресурсу используется режим
"пассивного ожидания". Поэтому в состав механизма включаются
средства
формирования
и
обслуживания
очереди
ожидающих
процессов,
которые
реализуются
супервизором
операционной
системы. Находясь в списке заблокированных, процесс не проверяет
семафор непрерывно, как в случае активного ожидания. Вместо
этого процессор занимается полезной работой, что повышает
эффективность работы системы.
Пусть S – семафор. Операция V над семафором S записывается
как V(S) и увеличивает переменную S на единицу одним неделимым
действием, т.е. выборка, инкремент и запоминание не могут быть
прерваны, и к S нет доступа другим процессам во время операции
V(S). Операция P над семафором S записывается как P(S) и
уменьшает переменную S на единицу, если это возможно. Если было
S=0, то уменьшение S невозможно и процесс, вызвавший P-операцию,
ждет, пока значение S не увеличится. Проверка и уменьшение
значения S также являются одним неделимым действием.
Рассмотрим вариант реализации семафорных примитивов:
P(S): S:=S-1;
If S<0 Then
{остановить процесс и поместить его в
очередь ожидания к семафору S}
V(S): If S<0 Then
{поместить один из ожидающих процессов
очереди семафора S в очередь готовности};
S:=S+1;
Если несколько процессов одновременно запрашивают P- или Vоперации над одним и тем же семафором, то эти операции будут
выполняться последовательно в произвольном порядке. Аналогично,
если несколько процессов ожидают выполнения
P-операции и
изменяемый семафор становится положительным, то процесс на
продолжение выполнения может выбираться по произвольному закону.
Участки взаимоисключения по семафору S в параллельных процессах
обрамляются операциями P(S) и V(S).
Для работы с семафорными переменными необходимо еще иметь
операцию инициализации самого семафора, т.е. операцию задания
ему начального значения. Обычно эту операцию называют InitSem и
она, как правило, имеет два параметра – имя семафорной
переменной и ее начальное значение. Обращение к ней тогда будет
иметь, например, следующий вид: InitSem(S,1).
В настоящее время используется много различных видов
семафорных
механизмов.
Варьируемыми
параметрами,
которые
отличают различные виды примитивов, являются начальное значение
и
диапазон
изменения
значений
семафора,
логика
действий
семафорных
операций,
количество
семафоров,
доступных
для
обработки при исполнении отдельного примитива. В некоторых
реализациях семафорные переменные могут быть отрицательными, и
67
величина отрицательного значения в таком случае указывает на
длину очереди процессов, стоящих в состоянии ожидания открытия
семафора.
Семафоры и операции над ними могут быть реализованы как
программно,
так
и
аппаратно.
Программно
они
могут
быть
реализованы с использованием режима активного ожидания, однако
это сопряжено с потерей эффективности. Как правило, они
реализуются в ядре операционной системы, где осуществляется
управление сменой состояния процессов.
Семафорные операции дают простое решение проблемы КС. Пусть S
– семафор, используемый для защиты КС. Тогда примитив P(S)
представляет собой вход взаимоисключения, а примитив V(S) –
выход
взаимоисключения.
Рассмотрим
пример
программы,
обеспечивающей взаимоисключение при помощи семафора.
Program example_semaphore1;
Var S : semaphore;
Procedure process_1;
Begin
While true Do
Begin
P(S);
CS1;
V(S);
program_1;
End;
End;
Procedure process_2;
Begin
While true Do
Begin
P(S);
CS2;
V(S);
program_2;
End;
End;
Begin
InitSem(S,1);
Parbegin
process_1; process_2;
Parend
End.
Семафор имеет начальное значение, равное 1. Если первый и
второй процессы попытаются одновременно выполнить примитив P(S),
то
это
удастся
успешно
сделать
только
одному
из
них.
Предположим, что это сделал первый процесс. Он закрыл семафор,
т.е. значение семафора стало S = 0, после чего данный процесс
вошел в свой критический интервал. Второй процесс при этом
оказывается заблокированным на семафоре – при попытке выполнения
операции P(S) он "засыпает". Взаимное исключение гарантировано,
т.к. только один процесс может уменьшить значение S до нуля с
68
помощью
P-операции.
Очевидным
образом
это
решение
распространяется на случай n процессов – тогда все другие
процессы, пытающиеся войти в свои КС при S = 0, будут вынуждены
ожидать
по
P(S).
Взаимное
блокирование
невозможно,
т.к.
одновременные попытки войти в свои КС при S = 0 должны, по
определению, преобразовываться в последовательные P-операции.
После выхода из своей КС процесс выполняет V-операцию, тем самым
открывая
семафор
и
предоставляя
возможность
"пробуждения"
блокированным процессам. Тогда один из блокированных процессов
переводится в очередь готовности.
При реализации возможно одно из двух решений в отношении
процессов, которые переводятся из очереди ожидания в очередь
готовности при выполнении примитива V(S):
процесс при его активизации вновь пытается выполнить
примитив P, считая предыдущую попытку неуспешной;
процесс при помещении его в очередь готовности отмечается
как успешно выполнивший примитив P. Тогда при его активизации
управление будет передано не на повторное выполнение
примитива P, а на команду, следующую за ним.
При первом способе возможна следующая последовательность
событий. Предположим, что начальное значение семафора было равно
единице. Пусть процесс2 в какой-то момент времени выполнит
операцию P(S), семафор S станет равным нулю, а процесс2 войдет в
свою КС. Далее процесс1 тоже попытается выполнить операцию P(S)
и "заснет" на семафоре, поскольку значение семафора теперь
станет равным –1. После выхода из КС процесс2 выполнит V(S), при
этом значение семафора станет равным 0, а процесс1 переведется в
очередь готовности. После активизации процесс1 снова выполнит
P(S) и опять "уснет", то же самое произойдет с процессом2, если
он пожелает войти в свою КС. "Пробуждать" процессы станет
некому.
Таким
образом,
возможно
возникновение
тупиковой
ситуации.
При втором способе реализации тупиковой ситуации не будет.
Действительно, при аналогичном варианте развития событий отличие
начнется с момента активизации процесса1. Он сразу войдет в свою
КС. При этом никакой другой процесс не попадет в критическую
секцию, т.к. семафор остается закрытым (его значение равно 0).
После окончания работы процесса1 в КС в результате выполнения им
операции V(S) значение семафора установится в единицу, если
другие процессы не совершали попыток попасть в КС. Если
процесс2, а также и другие процессы в случае их большего
количества, во время работы процесса1 в КС также выполнят
примитив P(S), то после выполнения процессом1 V-операции семафор
установится в 0. Следовательно, он будет закрыт для всех
процессов кроме того, который успел выполнить P-операцию, т.е.
сделал заявку на КС. Таким образом, тупик не возникнет, а
взаимоисключение гарантировано.
Возникновение тупиков возможно в случае несогласованного
выбора механизма реактивации процессов из очереди, с одной
стороны, и выбора алгоритмов семафорных операций – с другой (как
мы видим в первом способе реализации).
69
Реализация семафорных примитивов
В однопроцессорной вычислительной системе неделимость P- и Vопераций можно обеспечить с помощью простого запрета прерываний.
Сам семафор S можно реализовать записью с двумя полями. В одном
поле хранится целое значение S, во втором – указатель на список
процессов, заблокированных на семафоре S. Рассмотрим схематичное
представление
одного
из
программных
вариантов
реализации
рассмотренных примитивов и процедуры инициализации.
Program semaphore_release;
Type Semaphore : Record
счетчик : Integer;
указатель : Pointer;
end;
Var S : Semaphore;
Procedure P(Var S:Semaphore);
Begin
ЗАПРЕТИТЬ ПРЕРЫВАНИЯ;
S.счетчик:= S.счетчик-1;
If S.счетчик<0 Then
WAIT(S); {ПОСТАВИТЬ
ОБРАТИВШИЙСЯ
ПРОЦЕСС
В
СПИСОК
S.указатель И
УСТАНОВИТЬ НА ПРОЦЕССОР ГОТОВЫЙ
ВЫПОЛНЕНИЮ ПРОЦЕСС}
РАЗРЕШИТЬ ПРЕРЫВАНИЯ;
End;
Procedure V(Var S:Semaphore);
Begin
ЗАПРЕТИТЬ ПРЕРЫВАНИЯ;
S.счетчик:= S.счетчик+1;
If S.счетчик<=0 Then
RELEASE(S);
{ДЕБЛОКИРОВАТЬ
S.указатель}
РАЗРЕШИТЬ ПРЕРЫВАНИЯ;
End;
ПЕРВЫЙ
ПРОЦЕСС
ИЗ
СПИСКА
ПО
К
ПО
Procedure InitSem(Var S:Semaphore, n:Integer);
Begin
S.счетчик:=n;
S.указатель:=nil;
End;
2.5 Проблема производителя и потребителя
Каждый процесс в ВС может быть охарактеризован числом и типом
ресурсов, которые он использует (потребляет) и освобождает
(производит). Это могут быть различные ресурсы – основная
память, заполненные буферы, критические секции и т.п. Семафоры
могут быть использованы для учета ресурсов и для синхронизации
процессов, а также для запирания критических секций.
В случае, когда один процесс для своего продолжения должен
получить некоторое сообщение от другого процесса, для их
синхронизации
используются
семафоры.
Тогда
первый
процесс
блокируется, выполняя P-операцию, а пробуждается выполнением V-
70
операции другим процессом. Рассмотрим пример программы с такой
синхронизацией.
Program example_semaphore2;
Var S : semaphore;
Procedure process_1;
Begin
While true Do
Begin
. . .
P(S);
{ждать сигнала от процесса 2}
. . .
End;
End;
Procedure process_2;
Begin
While true Do
Begin
. . .
V(S);
. . .
End;
End;
{послать сигнал процессу 1}
Begin
InitSem(S,1);
Parbegin
process_1;
process_2;
Parend
End.
Процесс_1 можно рассматривать как потребляющий некоторый
ресурс, обозначенный S, посредством команды P(S), а процесс_2 –
как производящий этот ресурс посредством команды V(S).
Процесс-производитель
вырабатывает
информацию
и
затем
добавляет ее в буферную память; параллельно с этим процесспотребитель удаляет информацию из буферной памяти и затем
обрабатывает
ее.
Например,
потребитель
является
процессом
вывода, удаляющим запись асинхронно из буферной памяти и затем
печатающим ее.
ЛЕКЦИЯ 13 (16/04/04)
Эту задачу можно обобщить на случай нескольких буферов.
Пусть буферная память состоит из n буферов одинакового
размера, причем каждый буфер может хранить одну запись.
Предположим, что добавление к буферу и изъятие из него
информации образуют критические секции. Для подсчета имеющихся в
наличии свободных буферов будем использовать семафор empty.
Пусть
b
–
двоичный
семафор,
используемый
для
взаимного
исключения. Тогда процессы производитель и потребитель могут
быть описаны следующим образом (этот вариант работает не совсем
верно, как мы увидим ниже):
71
Program example_semaphore3;
Var empty, b : semaphore;
Procedure producer;
Begin
While true Do
Begin
Создать следующую запись;
P(empty);
{уменьшить кол-во свободных буферов}
P(b);
Добавить запись в буфер; V(b);
End;
End;
Procedure consumer;
Begin
While true Do
Begin
V(empty);
{*} {увеличить кол-во свободных буферов}
P(b);
Взять запись из буфера; V(b);
{**} Обработать запись;
End;
End;
Begin
InitSem(empty, n); InitSem(b,1);
Parbegin
producer; consumer;
Parend
End.
В рассмотренном варианте может сложиться следующая ситуация:
если буфер окажется полностью заполнен, а процесс-потребитель
будет прерван после выполнения операции V(empty) (в программе
обозначено {*}), то производитель сможет повторно записать
информацию в последнюю ячейку, хотя она оттуда еще не считана.
Кроме того, consumer может запуститься раньше и начнет читать из
пустого буфера. Если переместить операцию V(empty) после чтения
из буфера (обозначено {**}), то первый недостаток будет
устранен, но второй все равно останется.
Для того, чтобы избежать упомянутых проблем, необходимо
рассматривать заполненный буфер как самостоятельный ресурс, для
подсчета которого используется семафор full, характеризующий
число заполненных буферов. Тогда в программе добавится проверка
семафора full в процессе-потребителе и увеличение его в
производителе:
Program example_semaphore4;
Var empty, full, b : semaphore;
Procedure producer;
Begin
While true Do
Begin
Создать следующую запись;
P(empty);
{уменьшить кол-во свободных буферов}
P(b);
Добавить запись в буфер; V(b);
V(full);
{увеличить кол-во занятых буферов}
End;
End;
72
Procedure consumer;
Begin
While true Do
Begin
P(full);
{уменьшить кол-во занятых буферов}
P(b);
Взять запись из буфера; V(b); V(empty);
V(empty);
{увеличить кол-во свободных буферов}
Обработать запись;
End;
End;
Begin
InitSem(empty, n);
InitSem(full,0);
InitSem(b,1);
Parbegin
producer;
consumer;
Parend
End.
В последнем варианте программа будет корректно работать при
любом соотношении скоростей потоков. При этом операции изменения
full и empty должны быть неделимыми, иначе значения этих
переменных могут стать неверными.
2.6 Мьютексы
Одним из вариантов семафорных механизмов для реализации
взаимного исключения являются т.н. мьютексы (mutex). Мьютексы
реализованы во многих ОС, их основное назначение – организация
взаимного исключения для потоков одного или разных процессов.
Они представляют собой простейшие двоичные семафоры, которые
могут находиться в одном из двух состояний – в отмеченном или
неотмеченном (открыт и закрыт соответственно). Если какой-то
поток становится владельцем объекта mutex, тот переводится в
неотмеченное состояние. Когда задача освобождает мьютекс, его
состояние становится отмеченным. В каждый момент времени только
одна задача может владеть мьютексом.
Для того, чтобы мьютекс был доступен потокам разных
процессов, при создании ему необходимо присвоить имя, которое
потом должно быть передано "по наследству" другим задачам для
использования при их взаимодействии. Для этого существуют
специальные
системные
вызовы
(CreateMutex),
в
которых
указывается начальное значение мьютекса, его имя и, возможно,
атрибуты защиты. Если начальное значение мьютекса равно true, то
считается, что задача, создавшая этот объект, будет сразу им
владеть. При начальном значении false мьютекс не принадлежит ни
одной из задач и его состояние можно изменить только специальным
обращением.
Для работы с мьютексом имеется ряд функций: создание
(CreateMutex),
открытие
(OpenMutex),
ожидание
событий
(WaitForSingleObject
и
WaitForMultipleObjects),
освобождение
(ReleaseMutex). Конкретные обращения к этим функциям и перечни
их параметров приводятся в документации на соответствующую ОС.
73
2.7 Мониторы Хоара
Несмотря на очевидные достоинства (простота реализации,
независимость от количества процессов, отсутствие активного
ожидания), семафоры имеют ряд недостатков. Семафорные механизмы
являются слишком примитивными, т.к. сам семафор не указывает
непосредственно на синхронизирующее условие, с которым он
связан, или на критический ресурс. Поэтому при построении
сложных схем синхронизации алгоритмы решения задач получаются
запутанными и ненаглядными.
Нужны понятные и очевидные решения, которые позволяли бы
создавать
параллельные
взаимодействующие
программы.
Таким
решением являются т.н. мониторы, предложенные Хоаром (Hoare).
Монитор (в параллельном программировании) – это пассивный
набор разделяемых переменных и повторно входимых процедур
доступа
к
ним,
которым
процессы
пользуются
в
режиме
разделения, причем в каждый момент им может пользоваться
только один процесс.
Монитор представляет собой программный модуль, состоящий из
инициализирующей
последовательности,
одной
или
нескольких
процедур и локальных данных.
Основные характеристики:
1. Локальные переменные монитора доступны только его процедурам.
2. Процесс входит в монитор путем вызова одной из его процедур.
3. В мониторе в определенный момент времени может находиться
только
один
процесс;
любой
другой
обратившийся
будет
приостановлен в ожидании доступности монитора.
Пример монитора:
Пусть некоторый ресурс распределяется между процессами
планировщиком. Этот планировщик имеет переменные, с помощью
которых он отслеживает, занят ресурс или свободен. Для
получения ресурса процесс должен обратиться к планировщику,
причем процедуру планировщика разделяют все процессы, и такое
обращение может произойти в любой момент. Но планировщик не в
состоянии обслужить более одного процесса одновременно – он и
является монитором.
Т.о., монитор – такой механизм организации параллелизма,
который содержит данные и процедуры, необходимые для реализации
динамического распределения общих ресурсов.
Процесс, желающий получить доступ к разделяемым переменным,
обращается к монитору, который в свою очередь предоставляет
доступ или отказывает в нем. Вход в монитор находится под
жестким контролем. Здесь осуществляется взаимоисключение, т.е. в
любой момент времени только один процесс может войти в монитор.
Остальные обратившиеся процессы вынуждены ждать, причем режимом
ожидания автоматически управляет сам монитор. При отказе в
доступе монитор блокирует обратившийся процесс и определяет
условие, по которому процесс ждет. При деблокировании сам
монитор и проверяет это условие. Если процесс обращается к
некоторой
процедуре
монитора
и
обнаруживается,
что
соответствующий ресурс уже занят, эта процедура монитора выдает
команду WAIT с указанием условия ожидания. Процесс мог бы
74
оставаться внутри монитора, но это противоречит принципам
взаимоисключения, если в монитор бы затем вошел другой процесс.
Поэтому процесс в режиме ожидания вне монитора ждет, пока
требуемый ресурс освободится.
Доступ ко все внутренним данным монитора возможен только
изнутри монитора. При первом обращении монитор присваивает своим
переменным
начальные
значения;
при
последующих
обращениях
используются сохраненные от предыдущего обращения значения. Для
защиты каких-либо данных нужно просто поместить их в монитор.
Процесс, занимавший ресурс, со временем обратится к монитору,
чтобы возвратить ресурс системе. Соответствующая процедура
монитора может просто принять уведомление об освобождении
ресурса и ждать очередного запроса на этот ресурс. Но может
оказаться, что уже есть процессы, ожидающие освобождения этого
ресурса. Тогда монитор выполняет команду извещения SIGNAL, чтобы
один из ожидавших процессов мог получить ресурс и покинуть
монитор.
Если
ресурс
никому
не
требовался,
то
подобное
оповещение не вызывает никаких последствий, а ресурс вносится в
список свободных.
Чтобы гарантировать получение ресурса находившимся в ожидании
процессом, ему назначается более высокий приоритет, чем новым
процессам, пытающимся войти в монитор. В противном случае новый
процесс мог бы перехватить ресурс в момент его освобождения, что
при многократном повторении приведет к бесконечному ожиданию.
Для ОСРВ можно организовать дисциплину обслуживания на основе
абсолютных или динамически изменяемых приоритетов.
Пример монитора Хоара:
Monitor Resource;
condition free; {условие – свободный}
Var busy : Boolean;
Procedure Request; {запрос}
Begin
If busy then WAIT(free);
busy:=true;
TakeOff; {ВЫДАТЬ РЕСУРС}
End;
Procedure Release;
Begin
TakeOn; {ВЗЯТЬ РЕСУРС}
busy:=false;
SIGNAL(free)
End;
Begin
busy:=false;
End
Единственный ресурс динамически запрашивается и освобождается
процессами, которые обращаются к процедурам REQUEST и RELEASE.
Если процесс обращается к REQUEST в тот момент, когда ресурс
используется, то значение busy=true, и REQUEST выполнит операцию
75
монитора WAIT(free). Обратившийся процесс помещается в конец
очереди процессов, ожидающих, пока не будет выполнено условие
free.
Когда процесс, использующий ресурс, обращается к RELEASE,
операция монитора SIGNAL(free) деблокирует процесс из начала
очереди. Он готов сразу после операции WAIT(free), которая его и
блокировала, возобновить выполнение процедуры REQUEST.
Если же SIGNAL(free) выполняется в то время, когда нет
ожидающего условия free процесса, то никакие действия не
выполняются.
Доступ к разделяемым переменным ограничен телом монитора, а
мониторы входят в состав ядра ОС, поэтому разделяемые переменные
становятся системными переменными, что автоматически исключает
критические интервалы (два процесса никогда не смогут получить
одновременного доступа к разделяемым переменным).
Процедуры
монитора
выполняются
только
по
требованиям
процесса.
Преимущества монитора перед другими средствами синхронизации:
в форме монитора легко реализовать любой механизм;
повышается наглядность;
мониторы дают процессам возможность совместно использовать
программные
модули,
представляющие
собой
критические
секции.
Если несколько процессов совместно используют ресурс и
работают с ним совершенно одинаково, то в мониторе нужна только
одна процедура, в то время как решение с семафорами требует
наличия КС в каждом процессе.
Таким
образом,
мониторы
обеспечивают
по
сравнению
с
семафорами
упрощение
организации
взаимодействующих
вычислительных
процессов
и
большую
наглядность
при
незначительной потере эффективности.
ЛЕКЦИЯ 14 (23/04/04)
Решение задачи производителя-потребителя при помощи монитора
Рассмотрим
задачу
производителя-потребителя
в
той
же
постановке: буферная память состоит из n буферов одинакового
размера, каждый буфер может хранить одну запись, а добавление к
буферу и изъятие из него информации образуют критические секции.
Пусть считывание из буферной памяти выполняется по принципу FIFO
(First In – First Out), а сама буферная память имеет кольцевую
организацию. Это означает, что после заполнения (считывания)
элемента с номером N соответствующий указатель перемещается на
начало
буфера.
Тогда
для
контроля
за
состоянием
буфера
потребуется два указателя – номер очередного элемента для записи
(назовем его NextIn) и номер очередного элемента для считывания
– NextOut, а также счетчик количества элементов в буфере Count.
Условия обозначим через NotFull и NotEmpty.
Монитор под названием Buffers будет содержать процедуры
добавления элемента в буфер и считывания элемента из буфера:
Append и Take. Общими переменными являются массив буферных
элементов Buf, а также счетчик Count и указатели NextIn,
NextOut. Программная реализация задачи с помощью монитора будет
иметь вид:
76
Monitor Buffers;
Condition NotFull, NotEmpty;
Var Buf : Array [1..N] Of Char;
NextIn, NextOut, Count : Integer;
Procedure Append(X : Char);
Begin
If Count = N Then WAIT(NotFull);
{буфер полон}
Buf[NextIn] := X;
NextIn := NextIn mod N + 1;
inc(Count);
SIGNAL(NotEmpty); {возобновление работы потребителя}
End;
Procedure Take(Var X : Char);
Begin
If Count = 0 Then WAIT(NotEmpty);
{буфер пуст}
x := Buf[NextOut];
NextOut := NextOut mod N + 1;
dec(Count);
SIGNAL(NotFull); {возобновление работы производителя}
End;
Begin
NextIn := 0;
NextOut := 0;
Count := 0;
End;
Procedure Producer;
Var X : Char;
Begin
While true Do
Begin
Produce(X);
Append(X);
End;
End;
Procedure Consumer;
Var X : Char;
Begin
While true Do
Begin
Take(X);
Consume(X);
End;
End;
Begin
{main}
Parbegin;
Producer;
Consumer;
Parend;
End;
{тело монитора}
{выработка X}
{обработка X}
77
2.8 Обмен сообщениями
Передача
сообщений
–
один
из
способов
обеспечения
синхронизации процессов. Он пригоден для реализации в различных
системах (однопроцессорных, многопроцессорных, распределенных).
Системы передачи сообщений могут быть разных типов. Обычно
используются
два
примитива:
SEND(получатель,
сообщение)
и
RECEIVE(отправитель, сообщение). Процесс получает сообщение с
помощью примитива RECEIVE, отправляет сообщение с помощью
примитива SEND.
Синхронизация
Рассмотрим, что происходит после выполнения примитивов.
1) SEND.
После
его
выполнения
существует
2
возможности:
выполнивший его процесс блокируется или продолжает работу.
2) RECEIVE. Те же 2 возможности. Но при этом:
–
если сообщение уже было отправлено ранее, то процесс получает
его и продолжает работу;
–
если ожидаемого сообщения нет, то процесс или блокируется до
его получения, или отказывается от получения и продолжает
работу.
Таким образом, как отправитель, так и получатель могут быть
блокирующими и неблокирующими. Обычно встречаются три комбинации
(в реальных системах реализуются одна или две):
1.
2.
3.
Блокирующее отправление, блокирующее получение (рандеву) –
случай тесной синхронизации процессов.
Неблокирующее
отправление,
блокирующее
получение
(используется чаще всего). В этом варианте процесс может
максимально быстро рассылать сообщения, не ожидая их
получения адресатами.
Неблокирующее отправление, неблокирующее получение.
Для
примитива
SEND
наиболее
естественным
является
неблокирующий вариант. Например, он может быть использован при
запросе операции ввода-вывода. Недостатком является то, что при
возникновении
ошибки
может
начаться
непрерывная
генерация
сообщений, в результате чего произойдет неоправданная загрузка
системы. Кроме того, процесс-получатель в таком случае должен
посылать уведомление о получении сообщения.
Для
примитива
RECEIVE
наиболее
естественной
является
блокирующая форма, поскольку если процесс просит информацию, то,
видимо, она ему действительно нужна. Недостатком является то,
что
при
сбое
или
потере
сообщения
процесс
окажется
заблокированным навсегда. Для избавления от этого недостатка
можно указывать несколько возможных отправителей (если ожидаются
сообщения от нескольких источников), тогда после получения
любого из них процесс может продолжить работу.
Если использовать неблокирующий вариант RECEIVE, то при более
позднем отправлении сообщения (чем попытка его получить) оно
может быть потеряно. Для того, чтобы исключить такую ошибку,
можно перед выполнением RECEIVE проверять, имеется ли уже
сообщение (т.е. совершать какие-то дополнительные усилия).
78
Адресация
При выполнении примитива SEND необходимо знать получателя. В
большинстве реализаций возможно указать, сообщение от какого
отправителя должно быть принято. Схемы определения отправителя и
получателя в примитивах RECEIVE и SEND подразделяются на две
категории: прямая и косвенная адресация.
При прямой адресации:
Примитив
SEND()
указывает
конкретного
получателя.
Для
примитива RECEIVE возможны два варианта. 1) явное указание
отправителя, если процессы сотрудничают; 2) неизвестно, откуда
может прийти сообщение. Например, когда сервер печати принимает
сообщения – запросы на печать, то неизвестно, от какого из
процессов они могут поступить. В таком случае используется
неявная
адресация,
т.е.
"отправитель"
получит
конкретное
значение только после выполнения операции RECEIVE.
При косвенной адресации:
Сообщения посылаются не прямо от отправителя получателю, а в
некоторую
совместно
используемую
структуру
данных,
предназначенную для временного хранения сообщений (т.н. почтовые
ящики). Этот способ отличается эффективностью, т.к. достигается
определенная гибкость в использовании сообщений. Могут быть
организованы отношения самых разных типов между отправителем и
получателем: "один к одному", "один ко многим", "многие к
одному", "многие ко многим".
Так, отношение "один к одному" обеспечивает закрытую связь
между
двумя
процессами,
изолированную
от
постороннего
вмешательства. Отношение "многие к одному" соответствует модели
"клиент-сервер",
когда
один
сервер
обслуживает
множество
клиентов. Отношение "один ко многим" используется при рассылке
от
одного
процесса
множеству
получателей,
т.е.
при
широковещательном сообщении множеству процессов.
2.8.1 Почтовые ящики
Итак, для сохранения посланных, но еще не полученных
сообщений в системах предусмотрено специальное место, называемое
буфером сообщений или почтовым ящиком.
Почтовый ящик – это информационная структура, поддерживаемая
операционной системой. Она состоит из головного элемента, в
котором находится информация о данном почтовом ящике, и из
нескольких буферов (гнезд), в которые помещают сообщения. Размер
каждого буфера и их количество обычно задаются при создании
почтового ящика. Для пользования таким системным объектом
процессы обращаются к ОС с соответствующими запросами. Поскольку
в
системе
может
быть
много
почтовых
ящиков,
необходимо
обеспечить доступ процессу к конкретному ящику.
Если объем передаваемых данных велик, то нецелесообразно
пересылать их непосредственно. Лучше отправлять в почтовый ящик
сообщение, информирующее процесс-получатель о том, где найти эти
данные.
Почтовый ящик может быть связан только с отправителем, или
только с получателем, или с парой процессов (существует
79
множество различных вариантов). Правила работы почтового ящика
могут быть различными в зависимости от его сложности.
Основные достоинства почтовых ящиков:
процессу не нужно знать о существовании других процессов до
тех пор, пока он не получит сообщения от них;
два процесса могут обмениваться более чем одним сообщением за
один раз;
ОС может гарантировать невмешательство в общение двух
процессов;
очереди буферов позволяют процессу-отправителю продолжать
работу, не обращая внимание на получателя.
Недостатки:
Появление еще одного ресурса, которым нужно управлять;
Статический характер этого ресурса.
Были созданы механизмы, подобные почтовым ящикам,
реализованные на принципах динамического выделения памяти.
но
2.8.2 Конвейеры и очереди сообщений
Конвейер – это программный канал связи. Он является
средством, с помощью которого можно производить обмен данными
между процессами. Функции, с помощью которых выполняется запись
в канал и чтение из него, являются теми же самыми, что при
работе с файлами. По сути, канал представляет собой поток данных
между процессами. Конвейеры представляют собой буферную память,
работающую по принципу FIFO, т.е. по принципу обычной очереди.
При работе с каналом данные непосредственно помещаются в него,
что вызывает ограничения на размер передаваемых сообщений.
Канал (Pipe) был введен в
UNIX-системах и имеет размер не
более 64 К, поскольку в 16-разрядных мини-ЭВМ, для которых
создавалась эта система, нельзя было создать массив данных
большего размера. Работает он циклически, по принципу кольцевого
буфера.
Как
информационная
структура
описывается
идентификатором, размером и двумя указателями – на первый
элемент и на последний. Указатель Head на рисунке указывает на
Head
Tail
Tail
Функционирование
конвейера
(канала)
Head
первый записанный элемент, а Tail – на последний элемент
очереди. Заштрихованная область означает наличие информации.
Читается (и удаляется) всегда первый элемент, что вызывает
изменение значения указателя Head. При записи новых элементов
80
меняется значение указателя Tail. При достижении конца буфера
он как бы замыкается в кольцо, меняя значение указателя на
единицу.
Конвейер представляет собой системный ресурс, для работы с
ним процесс должен сделать соответствующий запрос операционной
системе.
Очереди сообщений являются более сложным методом связи между
взаимодействующими процессами. Одна или несколько задач могут
посылать сообщения задаче-приемнику. При этом только процессприемник может читать и удалять сообщения из очереди, а
процессы-отправители могут только помещать туда свои сообщения.
Очереди сообщений, в отличие от конвейеров, предоставляют
возможность использовать несколько дисциплин обработки:
FIFO – сообщение, записанное первым, первым будет прочитано;
LIFO (Last In – First Out) – сообщение, записанное последним,
будет прочитано первым;
приоритетный – сообщения читаются с учетом их приоритетов;
произвольный доступ, т.е. можно читать любое сообщение.
Второе отличие от каналов состоит в том, что при чтении из
канала сообщение удаляется, а при чтении из очереди – нет, т.е.
одно сообщение может быть прочитано при необходимости несколько
раз.
Третье отличие состоит в том, что в очередях присутствуют не
сами сообщения, а только их адреса в памяти и размер.
Очередь представляет собой системный механизм, поэтому
процесс для работы с ней должен получить разрешение на
использование общего сегмента памяти с помощью системных
запросов API. Во время чтения из очереди задача-приемник
пользуется следующей информацией:
идентификатор процесса (PID), который передал сообщение;
адрес и длина переданного сообщения;
ждать или нет, если очередь пуста;
приоритет переданного сообщения;
номер освобождаемого семафора, когда сообщение передается в
очередь.
Итак, мы рассмотрели основные средства, используемые
синхронизации процессов в мультипрограммной системе.
для
81
ЛЕКЦИЯ 15 (30/04/04)
§3 Управление памятью
Термин
"память"
используется
для
обозначения
любого
устройства, способного хранить информацию. Мы будем иметь в виду
оперативную память компьютера (ОЗУ). Управление памятью – одна
из основных задач ОС, и занимается им менеджер памяти, который
входит в состав ядра ОС.
3.1
Память
пространство
и
отображения,
виртуальное
адресное
Существует понятие физической оперативной памяти, с которой
собственно и работает процессор, извлекая из нее команды и
данные и помещая в нее результаты вычислений. Физическая память
представляет
собой
упорядоченное
множество
пронумерованных
ячеек.
Количество
ячеек
физической
памяти
ограничено
и
фиксировано. С другой стороны, программист обращается к памяти с
помощью некоторого набора логических имен, которые, как правило,
являются символьными и для которых отсутствует отношение
порядка. Имена переменных и входных точек программных модулей
составляют пространство имен.
Системное
программное
обеспечение
должно
связать
каждое
Логическое (символьное) имя
Пространство имен программы
Система
программирования
Операционная
система
Виртуальное адресное пространство
Виртуальный адрес
Физическая память компьютера
Ячейка оперативной памяти
(физический адрес)
указанное пользователем имя с физической ячейкой памяти, т.е.
осуществить отображение пространства имен на физическую память
компьютера. Существуют разные схемы такого отображения. В общем
случае это отображение осуществляется в два этапа – сначала
системой программирования, затем операционной системой. Между
этими этапами обращения к памяти имеют форму виртуального или
логического
адреса.
Множество
всех
допустимых
значений
виртуального адреса для некоторой программы определяет ее
виртуальное адресное пространство или виртуальную память.
Появление
виртуальной
памяти
стало
одним
из
главных
усовершенствований архитектуры компьютеров. Она была впервые
82
реализована в 1959 г. на компьютере "Атлас" в Манчестерском
университете и приобрела популярность только спустя десятилетие.
Система программирования осуществляет трансляцию и компоновку
программы,
используя
библиотечные
программные
модули.
В
результате полученные виртуальные адреса могут иметь двоичную
или символьно-двоичную форму. Для тех программных модулей,
адреса которых пока не могут быть определены и имеют по-прежнему
символьную форму, окончательная привязка их к физическим ячейкам
будет осуществлена на этапе загрузки программы в память перед ее
непосредственным выполнением.
Одним из частных случаев отображения пространства имен на
физическую
память
является
тождественность
виртуального
адресного
пространства
физической
памяти.
При
этом
нет
необходимости осуществлять второе отображение; тогда говорят,
что система программирования генерирует абсолютную двоичную
программу, которая сможет исполняться только в том случае, если
ее виртуальные адреса будут точно соответствовать физическим.
Другим частным случаем общей схемы трансляции является
тождественность виртуального адресного пространства исходному
пространству имен. Здесь уже отображение выполняется самой ОС.
Данную схему можно было встретить в простейших компьютерных
системах, в которых вместо операционной системы использовался
встроенный интерпретатор.
Существуют и промежуточные варианты, когда трансляторкомпилятор
генерирует
виртуальные
адреса
с
последующей
настройкой программы на один из виртуальных разделов, а второе
отображение осуществляется перемещающим загрузчиком.
Термин "виртуальная память" фактически относится к системам,
которые сохраняют виртуальные адреса во время исполнения. Так
как второе отображение осуществляется в процессе исполнения
задачи, то адреса физических ячеек могут изменяться.
Размер виртуального адресного пространства программы прежде
всего
зависит
от
архитектуры
процессора
и
от
системы
программирования и практически не зависит от объема реальной
физической памяти.
Размер виртуального адресного пространства может быть меньше
объема
физической
памяти
(старые
16-разрядные
ЭВМ
могли
адресовать только до 216 = 64К адресов). В таком случае вся
физическая память разбивалась на разделы объемом по 64К, и на
каждый
такой
раздел
с
помощью
специальных
регистров
осуществлялось
отображение
своего
виртуального
адресного
пространства.
Эти величины могут совпадать или, как наиболее распространено
в наше время, виртуальное адресное пространство может превышать
объем
физической
памяти.
Для
таких
случаев
существуют
специальные методы распределения памяти, различающиеся как по
сложности, так и по эффективности.
Суть концепции виртуальной памяти заключается в том, что
адреса, к которым обращается выполняющийся процесс, отделяются
от адресов, реально существующих в оперативной памяти.
Главной
особенностью
виртуальной
памяти
является
преобразование (или трансляция) адреса, к которому производится
83
обращение со стороны программы, в реальный адрес. Причем это
преобразование
должно
выполняться
быстро.
Механизмы
динамического преобразования адресов (ДПА) преобразуют смежные
адреса виртуальной памяти в необязательно смежные адреса
реальной памяти. Таким образом, пользователь освобождается от
необходимости учитывать размещение своих процедур и данных в
реальной памяти. Программа обращается к виртуальной памяти по
виртуальному адресу.
Чтобы
избежать
индивидуального
отображения
элементов
информации, они группируются в блоки, и система следит за тем, в
каких местах реальной памяти размещаются различные блоки
виртуальной памяти. Чем больше размер блока, тем меньшую долю
емкости реальной памяти нужно затрачивать на хранение информации
отображения. Однако крупные блоки требуют большего времени на
обмен между внешней и оперативной памятью и ограничивают
количество процессов, которые могут совместно использовать
оперативную память.
Если все блоки имеют одинаковые размеры, то они называются
страницами,
а
соответствующая
организация
ВП
называется
страничной. Если блоки могут быть различных размеров, они
называются сегментами, а организация ВП – сегментной.
Адреса
в
системе
поблочного
отображения
являются
двухкомпонентными. Для обращения к конкретному элементу данных
программа указывает блок, в котором этот элемент располагается,
и смещение этого элемента относительно начала блока, т.е.
виртуальный адрес имеет вид упорядоченной пары <начало блока,
смещение>. Преобразование адреса ВП в адрес реальной памяти
происходит с помощью таблицы отображения блоков, размещаемой в
реальной памяти. Эта таблица строится для каждого процесса.
Две модели преобразования адреса – сегментная и страничная –
могут применяться как в чистом виде, так и комбинироваться, и
тогда сегменты реализуются как объекты переменных размеров,
формируемые из страниц фиксированного размера. В таком случае
адрес состоит из трех компонентов <сегмент, страница, смещение>.
3.2 Организация и распределение памяти
Способ организации памяти определяет выбор одного из
альтернативных
вариантов
в
каждом
вопросе,
связанном
с
выделением и использованием оперативной памяти:
1) Помещение в память только одной программы пользователя или
нескольких программ одновременно.
2) Выделение программам одинакового или различного числа ячеек
памяти.
3) Статическое разбиение памяти или динамическое планирование.
4) Размещение программы в непрерывном блоке или разбивание ее на
отдельные блоки с размещением их в "дырах".
Независимо от способа организации памяти выбирается та или
иная
стратегия
управления
для
достижения
оптимальных
характеристик. Менеджер памяти выбирает конкретный подход и
принимает решение по следующим вопросам:
84
1) Выбор момента помещения новой программы в оперативную память
– это можно делать по запросу системы или предварительно,
предупреждая запрос.
2) Выбор места памяти для размещения очередной программы.
3) Размещение программы как можно более плотное с экономией
памяти или как можно быстрое с экономией времени.
4) Выбор программы на удаление для загрузки данной программы в
случае, если занята вся память. Возможны различные варианты:
выбирается программа, которая дольше всех находилась в памяти,
или которая дольше всех не использовалась, или использовалась
наименее часто.
Первые компьютеры имели очень простую организацию памяти.
Память представляла собой пронумерованную последовательность
ячеек, содержащих информацию. Программы обращались к этим
ячейкам напрямую по их номерам. Любая программа могла обратиться
к любой области памяти, что сильно осложняло написание и отладку
программ, поскольку ошибка могла легко привести к повреждению
важной информации, например, кода или данных ОС. Задачи ОС по
управлению памятью сводились только к выделению и освобождению
блоков памяти заданного размера.
С развитием архитектуры компьютеров усложнилась организация
памяти, а также усложнились и расширились задачи операционной
системы по управлению памятью.
3.2.1
Простое
непрерывное
распределение
распределение с перекрытием (оверлейные структуры)
Самой
простой
схемой
является
простое
распределение (т.н. связное распределение), при
память условно разделяется на три части:
и
непрерывное
котором вся
область, занимаемая операционной системой;
область, в которой размещается исполняемая задача;
незанятая (свободная) область памяти.
Данная
схема
не
предполагает
поддержки
мультипрограммирования,
поэтому
не
возникает
проблемы
распределения памяти между несколькими задачами. Область памяти,
отведенная задаче, является непрерывной, что облегчает работу
системы программирования. Поскольку в различных однотипных
вычислительных комплексах может быть разный состав внешних
устройств, для системных нужд могут потребоваться отличающиеся
объемы ОП, поэтому привязка виртуальных адресов программы к
физическому адресному пространству осуществляется на этапе
загрузки задачи в память.
Вариантов
простого
непрерывного
распределения
памяти
существовало очень много (примером может являться ОС MS-DOS).
В случае, если необходимо создать программу, логическое (и
виртуальное) адресное пространство которой должно быть больше,
чем весь возможный объем ОП, используется распределение с
перекрытием (т.н.
оверлейные структуры). При этом методе
распределения предполагается, что вся программа может быть
разбита на части – сегменты. Каждая оверлейная программа имеет
85
одну главную часть и несколько сегментов, причем в памяти
компьютера одновременно могут находиться только главная часть и
один или несколько не перекрывающихся сегментов. После того, как
текущий сегмент закончит свое выполнение, возможны два варианта:
Этот сегмент сам обращается к ОС с указанием, какой сегмент
нужно загрузить следующим.
Он возвращает управление главному сегменту задачи (модуль
main), и уже тот обращается к ОС с указанием, какой сегмент
нужно сохранить, а какой загрузить в ОП, и снова отдает
управление одному из сегментов, находящихся в памяти.
Поначалу программисты сами должны были планировать, какие
сегменты можно размещать в памяти одновременно, чтобы их
адресные пространства не пересекались, и включать в тексты
программ соответствующие обращения к ОС. Но с некоторых пор
системы
программирования
стали
автоматически
подставлять
соответствующие вызовы ОС в код программы.
ЛЕКЦИЯ 16 (07/05/04)
3.2.2 Распределение
разделами
статическими
и
динамическими
Для
организации
мультипрограммного
режима
необходимо
обеспечить одновременное нахождение в памяти нескольких задач
(целиком или частями). При самой простой схеме распределения
память, незанятая ядром ОС, может быть разбита на несколько
непрерывных частей (зон, разделов), которые характеризуются
именем,
типом,
границами.
Разбиение
памяти
может
быть
фиксированным (статическим) или динамическим.
Разделы с фиксированными границами. Разбиение памяти может
осуществляться при генерации ОС или по мере необходимости
оператором системы. В каждом разделе в каждый момент времени
может располагаться по одной задаче, и по отношению к каждому
разделу можно применять все те методы, которые используются для
однопрограммных
систем.
Возможно
использовать
оверлейные
структуры, что позволяет создавать большие и сложные программы и
в то же время поддерживать коэффициент мультипрограммирования на
должном уровне (коэффициент мультипрограммирования – количество
параллельно выполняемых программ).
При небольшом объеме памяти (и небольшом количестве разделов)
можно увеличить количество параллельно выполняемых приложений за
счет свопинга. При свопинге приостановленная задача может быть
целиком выгружена во внешнюю память (на диск), а на ее место
загружается с диска готовая к выполнению задача, находившаяся в
приостановленном состоянии. Особенно эффективен такой прием в
отношении
интерактивных
приложений,
которые
часто
ожидают
выполнения операций ввода-вывода.
Важной проблемой является защита ОС и приложений друг от
друга. Одной из простейших мер является введение регистров
защиты памяти, в которые ОС заносит граничные разделы области
памяти текущей задачи. При нарушении адресации возникает
86
прерывание
реализации
механизмы.
и
управление
передается
функций защиты требуются
супервизору
специальные
ОС.
Для
аппаратные
Основным недостатком такого способа распределения является
возникновение фрагментации памяти. В каждом из разделов может
оставаться неиспользованная память, которая в сумме дает весьма
ощутимые потери. Но использовать эти свободные части при таком
способе распределения не представляется возможным.
Для сокращения потерь были предложены варианты:
выделять раздел ровно такого объема, который нужен под
текущую задачу;
размещать задачу не в одной непрерывной области памяти, а в
нескольких областях.
Разделы
с
подвижными
границами.
Чтобы
избавиться
от
фрагментации, можно попробовать размещать в ОП задачи плотно,
одну за другой, выделяя каждой столько памяти, сколько для нее
требуется (Первая ОС, реализовавшая этот способ – OS MVT –
"мультипрограммирование с переменным числом задач", ОС для
больших ЭВМ класса IBM 360). Специальный планировщик (диспетчер
памяти) ведет список адресов свободной ОП. При появлении новой
задачи он просматривает этот список и выделяет для задачи
раздел, объем которого равен необходимому или чуть больше, если
память выделяется не ячейками, а некими дискретными единицами.
При
этом
список
свободной
памяти
модифицируется.
При
освобождении раздела диспетчер пытается объединить смежные
свободные участки памяти.
Список свободных участков может быть упорядочен либо по
адресам, либо по объему. Выделение памяти под новый раздел может
осуществляться одним из трех способов:
первый подходящий участок;
самый подходящий участок;
самый неподходящий участок;
В первом случае список упорядочивается по адресам. Правило
"первый подходящий" приводит к тому, что память для небольших
задач будет преимущественно выделяться в области младших адресов
и, следовательно, повысится вероятность того, что в области
старших
адресов
будут
образовываться
фрагменты
достаточно
большого объема. При
таком способе диспетчеру приходится
просматривать в среднем половину списка.
Второй вариант предполагает, что список свободных областей
упорядочен по возрастанию их объема. Тогда при просмотре списка
для нового раздела будет использован фрагмент наиболее близкого
размера. Просмотреть придется тоже приблизительно половину
списка. Оставшийся фрагмент окажется настолько малым, что в нем
уже вряд ли удастся что-то еще разместить, кроме того, он
окажется в начале списка. Поэтому в целом такой способ не
является эффективным.
Самым эффективным правилом, как ни странно, является
последнее. При нем список упорядочивается по убыванию объемов
свободных фрагментов. Очевидно, что такой фрагмент будет найден
87
сразу, причем, поскольку он является самым большим, то после
выделения из него раздела для задачи оставшаяся область памяти
может быть еще использована в дальнейшем.
Очевидно, что в силу того, что задачи имеют разные объемы и
появляются и завершаются в произвольные моменты времени, при
любой дисциплине обслуживания всегда будет наблюдаться сильная
фрагментация памяти. Возможно, что новый раздел нельзя будет
образовать, несмотря на то, что суммарный объем свободной памяти
окажется превосходящим тот, который необходим для задачи. В
такой ситуации возможно организовать т.н. "уплотнение памяти",
при котором приостанавливаются все вычисления и диспетчер памяти
перемещает свободные разделы в тот или иной конец памяти с
соответствующей корректировкой списков. Тогда при определении
физических адресов задачи будут участвовать уже новые значения
базовых регистров. Недостатками данного решения являются потери
времени на уплотнение и приостановка всех процессов. В системах
реального времени такой способ непригоден.
Методы распределения памяти, при которых задаче может не
предоставляться сплошная область памяти, называются разрывными,
или несвязными. Размещение задачи в нескольких областях требует
соответствующей аппаратной поддержки – наличия относительной
адресации. В настоящее время применяется сегментная, страничная
и сегментно-страничная организация памяти (рассмотрим далее),
причем способы организации памяти относятся как к виртуальному,
так и к физическому адресному пространству.
3.3
Сегментная,
страничная
организация памяти
и
сегментно-страничная
3.3.1 Сегментный способ организации памяти
Первым среди разрывных методов распределения памяти был
сегментный. Естественным способом разбиения программы на части
является разбиение ее на логические элементы – т.н. сегменты.
Каждый программный модуль может быть воспринят как отдельный
сегмент.
Логически обращение к элементам программы в этом случае будет
выглядеть как указание имени сегмента и смещения относительно
начала этого сегмента. Физически имя (или порядковый номер)
сегмента будет соответствовать некоторому адресу, с которого
этот сегмент начинается при его размещении в памяти, и смещение
должно прибавляться к этому базовому адресу.
Преобразование имени сегмента в его порядковый номер
осуществляет система программирования. ОС размещает сегменты в
память и для каждого сегмента получает информацию о его начале.
Каждый сегмент, помещаемый в память, имеет соответствующую
информационную структуру, называемую дескриптором сегмента. Для
любого исполняемого процесса ОС строит таблицу дескрипторов
сегментов и с помощью бита присутствия отмечает для каждого
сегмента его текущее местоположение. В дескрипторе сегмента,
помимо
указания
его
адреса,
длины
и
бита
присутствия,
содержатся, как правило, данные о его типе (сегмент кода или
88
данных), правах доступа (можно ли модифицировать, предоставлять
другой задаче), отметка об обращениях к данному сегменту (как
часто, давно или нет он использовался).
Достоинства сегментного метода:
программу
можно
загружать
не
целиком,
а
по
мере
необходимости;
некоторые программные модули могут быть разделяемыми – они
являются сегментами, и к ним достаточно легко можно
организовать доступ посредством помещения в дескрипторы
сегментов указателей на такие разделяемые сегменты.
Недостатки сегментного метода:
замедление доступа к требуемой ячейке памяти;
потери памяти и процессорного времени на
обработку дескрипторных таблиц.
размещение
и
В
качестве
примера
операционной
системы,
применяющей
сегментное преобразование памяти, можно назвать OS/2.
3.3.2 Страничный способ организации памяти
В основу страничного преобразования положено разбиение всей
памяти на страницы. Страницы, в отличие от сегментов, имеют
фиксированную длину, обычно являющуюся степенью числа 2, и не
могут перекрываться. Страницы в физической памяти называются
физическими страницами, а страницы в виртуальной памяти –
виртуальными
страницами.
Адрес
при
страничной
организации
представляет собой упорядоченную пару, состоящую из номера
страницы и смещения.
Страничное
преобразование
заключается
в
замене
номера
виртуальной страницы на номер физической. Каждой виртуальной
странице ставится в соответствие физическая, или говорят, что в
виртуальную страницу отображена физическая. Т.е. страничное
преобразование
–
это
отображение
физических
страниц
в
виртуальные.
Для
этого
отображения
существует
таблица
дескрипторов страниц. Отличие от таблицы дескрипторов сегментов
состоит в том, что здесь не требуется поле длины.
Виртуальный адрес
Номер виртуальной страницы
Смещение внутри страницы
Таблица страниц
Атрибуты
Номер физической страницы
Физ. страница
Смещение внутри страницы
89
Физический адрес
Поскольку размер страницы – величина фиксированная, то
существует проблема его правильного выбора. Чем больше размер
страницы,
тем
меньше
будет
размер
структуры
данных,
обслуживающих преобразование адресов, но и тем больше будут
потери, связанные с тем, что память можно выделять только
постранично (возникает фрагментация). На некоторых архитектурах
размер страниц задан аппаратно, например, на Intel – это 4
Кбайт, на DEC PDP-11 – 8 Кбайт, а на других архитектурах, таких,
как Motorola 68030, размер страниц задается программно.
Важными характеристиками архитектуры процессора являются
размеры
физического
и
виртуального
адресных
пространств,
определяющих соответственно ограничение на размер физической
памяти и пределы, в которых может меняться виртуальный адрес.
Размеры адресных пространств обычно определяются разрядностью
архитектуры процессора. Самыми распространенными сейчас являются
32-разрядные
процессоры,
позволяющие
создавать
виртуальные
адресные пространства размером 232 байт (4 Гбайта).
Страничное преобразование представляет собой совокупность
аппаратных и программных средств, обеспечивающих механизмы
виртуальной памяти, свопинга и реализацию других алгоритмов
управления памятью.
Основным достоинством
страничного способа распределения
памяти является минимально возможная фрагментация.
Недостатки страничного преобразования:
как и при сегментном методе, потери памяти и процессорного
времени на размещение и обработку дескрипторных таблиц;
программы разбиваются на страницы случайно, без учета
логических взаимосвязей, имеющихся в коде, следовательно,
межстраничные
переходы
осуществляются
чаще,
чем
межсегментные.
Вследствие
этого
труднее
организовать
разделение
программных
модулей
между
выполняющимися
процессами.
Для того, чтобы избежать недостатков, сохранив достоинства,
был предложен сегментно-страничный способ организации. При этом
способе программа тоже разбивается на логически законченные
части – сегменты, и виртуальный адрес содержит указание на номер
соответствующего сегмента. Вторая составляющая виртуального
адреса – смещение относительно начала сегмента – в свою очередь,
также состоит из двух полей – виртуальной страницы и индекса.
Таким образом, виртуальный адрес теперь состоит из трех
компонентов: сегмент, страница, индекс. Достоинства метода
несомненны: сегменты разбиты на страницы, все страницы сегмента
загружаются в память, что позволяет уменьшить обращения к
отсутствующим страницам в силу того, что вероятность выхода за
пределы сегмента меньше, чем за пределы страницы. Наличие
сегментов облегчает возможность разделения программных модулей
между параллельными процессами, а выделение памяти страницами
уменьшает фрагментацию. Но этот способ организации вносит еще
большую задержку доступа к памяти. Существуют специальные
методы, позволяющие ускорить обращение к элементу памяти, однако
90
их реализация достаточно сложна и дорога в исполнении, поэтому
в ПК такой способ практически не используется.
ЛЕКЦИЯ 17 (14/05/04)
3.4 Стратегии управления
При использовании свопинга система создает на диске свопфайл. Стратегии управления вталкиванием (выборкой), размещением
и выталкиванием (замещением) информации применительно к системам
виртуальной памяти используются как при сегментной, так и при
страничной организации памяти. Рассмотрим их на примере страниц.
В тот момент, когда процесс обращается к странице, которой
нет в оперативной памяти, в действие вступает алгоритм выборки
(или алгоритм вталкивания). Он заключается в загрузке страницы с
диска в свободную физическую страницу и отображении этой
физической страницы в то место, куда было произведено обращение,
вызвавшее
исключительную
ситуацию.
Кроме
того,
необходимо
определить, в какой момент следует переписывать страницу (или
сегмент) с диска в оперативную память. Вталкивание по запросу
производится после появления ссылки и гарантирует необходимость
подкачиваемого сегмента или страницы. Существуют модификации
алгоритма
выборки,
которые
применяют
опережающее
чтение
(вталкивание
с
упреждением)
–
кроме
страницы,
вызвавшей
исключительную ситуацию, в память загружается еще несколько
страниц, к которым наиболее вероятно будет обращаться процесс.
Это позволяет уменьшить накладные расходы, связанные с большим
количеством исключительных ситуаций, возникающих при работе с
большими объемами данных или кода. Кроме того, оптимизируется
работа с диском, поскольку появляется возможность загрузки
нескольких страниц за одно обращение. При правильном выборе
страниц время выполнения задачи значительно сокращается.
Когда процесс вызывает исключительную ситуацию отсутствия
страницы, система должна определить, где в физической памяти
следует поместить загружаемую страницу. Это делается с помощью
алгоритма размещения. Дисциплины выбора первого подходящего
раздела, наиболее подходящего и наименее подходящего уже
сравнивались выше, при рассмотрении динамических разделов.
Алгоритмы замещения (выталкивания) вступают в силу, когда
нужна свободная физическая страница, но они все заняты.
Назначение алгоритмов – определить, какая физическая страница
должна быть удалена (записана на диск), чтобы освободить место
для новой страницы. Существует несколько вариантов алгоритмов
замещения. Проанализируем их достоинства и недостатки.
1) Принцип оптимальности (идеальный алгоритм) – заменить ту
страницу, к которой не будет новых обращений в течение наиболее
длительного времени. Практически нереализуем, т.к. невозможно
точно знать заранее, к каким страницам будут обращаться
процессы, а к каким – нет. Для того, чтобы алгоритм замещения
был максимально близок к идеальному, система должна как можно
точнее предсказывать будущие обращения процессов к памяти.
91
2) Выталкивание случайной страницы. Данная стратегия проста,
но неэффективна.
3) Алгоритм FIFO (First In – First Out) – для освобождения
выбирается страница, дольше всего находившаяся в физической
памяти. Реализуется созданием очереди страниц. Недостаток –
могут быть удалены активно используемые страницы.
4) Алгоритм
LRU
(Least
Recently
Used
–
дольше
всего
неиспользуемый) – в памяти освобождается страница, к которой
наиболее долго не обращались. Существуют разные реализации
алгоритма: основанные на связном списке страниц в памяти,
отсортированном по давности обращений; использующие таймер;
использующие
специальную
матрицу.
Эти
алгоритмы
требуют
специальной аппаратной поддержки.
5) Алгоритм LFU (Least Frequently Used) – выталкивание реже
всего используемой страницы, т.е. страницы, к которой было
меньше всего обращений. Недостаток – может быть вытолкнута
только что записанная страница, поскольку как раз к ней и было
меньше обращений.
6) NUR (Not Used Recently) – выталкивание страницы, не
использовавшейся в последнее время. Он предусматривает введение
двух битов-признаков на страницу: бита-признака обращения и
бита-признака модификации. Биты-признаки обращений периодически
сбрасываются в ноль, чтобы давно неиспользуемые страницы не
задерживались
в
памяти.
В
первую
очередь
для
замещения
выбирается страница без обращений, а из них – страница без
модификаций.
Если объем физической памяти небольшой и даже часто требуемые
страницы не удается разместить в ОП, то возникает т.н.
"пробуксовка" –
ситуация, когда загрузка нужной страницы
вызывает перемещение на диск страницы, которая также активно
используется.
Варианты
борьбы
с
этим
явлением
включают:
увеличение
объема
ОП;
уменьшение
количества
параллельно
выполняемых задач; использование более эффективной дисциплины
замещения.
В большинстве современных ОС используется дисциплина LRU как
наиболее эффективная. Примеры – операционные системы OS/2,
Linux. Но в некоторых ОС, разработчики которых стремились
сделать
систему
максимально
независимой
от
аппаратных
возможностей
процессора,
применяются
другие
дисциплины.
Например, в ОС Windows NT используется правило FIFO. Для того,
чтобы устранить его недостатки, применяется "буферизация" тех
страниц, которые предназначены к выгрузке, как некоторый
промежуточный этап. Т.е., прежде чем выгрузить выбранную
страницу, ее помечают как кандидата на выгрузку. Если в
следующий раз к ней происходит обращение, то она никуда не
выгружается, а уходит в конец списка FIFO. В противном случае ее
выгружают, а в кандидаты на выгрузку выбирают следующую
страницу. Поскольку величина такого "буфера" не может быть
большой, эффективность страничной реализации памяти в Windows NT
ниже, чем у вышеназванных ОС, и даже при существенно большем
объеме памяти начинается явление пробуксовки.
92
В некоторых ОС для борьбы с "пробуксовкой" используется
метод "рабочего множества", который заключается в следующем.
Частота обращений к странице зависит от ее содержимого, причем
одни страницы используются значительно чаще, чем другие. Поэтому
нет смысла загружать в оперативную память как можно больше
страниц. Вместо этого можно выделить подмножество страниц,
которое
используется
часто.
Такое
подмножество
называется
рабочим
множеством
страниц
программы.
Реально
количество
активных страниц задачи (за интервал времени) все время
изменяется, но для каждой задачи может быть определено среднее
количество активных страниц. Его выбор зависит от конкретной
программы и осуществляется экспериментально. Размер рабочего
множества может быть фиксированным или настраиваться динамически
(в некоторых заданных пределах). Для предотвращения пробуксовки
достаточно планировать на выполнение такое количество задач,
чтобы сумма их рабочих множеств не превышала возможностей
системы.
3.5 Защита на уровне страниц
Важнейшей проблемой, которая возникает при организации
мультипрограммного режима, является защита памяти. Для того,
чтобы выполняющиеся приложения не могли испортить другие
вычислительные процессы и саму ОС, необходимо, чтобы доступ к
таблицам сегментов или страниц был обеспечен только для кода
самой ОС. Для этого код ОС должен выполняться в некотором
привилегированном
режиме,
из
которого
можно
осуществлять
манипуляции с дескрипторами, тогда как выход за пределы сегмента
в обычной прикладной программе должен вызывать прерывание по
защите памяти. Каждая прикладная задача должна иметь возможность
обращаться только к своим собственным сегментам. В каждый
конкретный момент времени процессор находится в одном из режимов
– в режиме пользователя или в режиме ядра (подробно об этом
поговорим позднее). На разных архитектурах способы переключения
режима организованы по-разному, но суть от этого не меняется.
Механизм защиты заключается в том, что процессор определяет
допустимость операции, сравнивая текущий режим процессора и вид
обращения к памяти с атрибутами страницы, к которой производится
обращение. Рассмотрим атрибуты страниц, управляющие механизмами
защиты.
Например, атрибут "только чтение" определяет, что операция
записи в данную страницу запрещена. Атрибут "страница ядра"
определяет, что запрещено любое обращение к данной странице,
когда процессор находится в режиме пользователя. Атрибут "только
выполнение" определяет, что разрешено только выполнение кода
программы, записанного в данной странице. Вместо последнего
атрибута может использоваться атрибут "только чтение".
При попытке выполнить запрещенную операцию срабатывает
механизм
исключительных
ситуаций.
Возникает
исключительная
ситуация "страничное нарушение", приводящая к вызову специальной
программы-обработчика для этой ситуации. Этот обработчик уже
решает, что необходимо предпринять для разрешения конкретного
вида
страничного
нарушения.
Страничное
нарушение
обычно
происходит в следующих случаях:
93
при попытке записи в страницу с атрибутом "только чтение";
при попытке обращения к странице ядра из режима пользователя;
при попытке чтения или записи страницы с атрибутом "только
выполнение";
при любом обращении к отсутствующей странице.
В любом из этих случаев вызывается обработчик страничного
нарушения, который является частью ОС. Ему передается причина
возникновения
исключительной
ситуации
и
соответствующий
виртуальный адрес.
Здесь рассмотрены наиболее распространенные атрибуты защиты,
на некоторых архитектурах могут быть реализованы и другие.