Системный анализ, управление и автоматизация УДК 62-50 КВАЗИСКОЛЬЗЯЩИЕ ПРОЦЕССЫ В РЕЛЕЙНЫХ СИСТЕМАХ
advertisement

ВЕСТН. САМАР. ГОС. ТЕХН. УН-ТА. СЕР. ТЕХНИЧЕСКИЕ НАУКИ. 2008. № 1 (21)
Системный анализ, управление и автоматизация
УДК 62-50
В.Е. Вохрышев, Д.А. Рагазин
КВАЗИСКОЛЬЗЯЩИЕ ПРОЦЕССЫ В РЕЛЕЙНЫХ СИСТЕМАХ
С ОТРИЦАТЕЛЬНЫМ ПЕРЕМЕННЫМ ГИСТЕРЕЗИСОМ
Исследованы квазискользящие процессы в релейных системах и алгоритмы их управления, построенные с использованием в обратной связи экстремумов регулируемой координаты.
В практике управления динамическими объектами релейные системы, работающие по
принципу «включено-выключено», получили широкое распространение благодаря простой
конструкции, алгоритмической и программной реализации, высокому быстродействию и
надежности [1, 2].
Существенным преимуществом релейного управления является также значительное упрощение исполнительного механизма системы за счет снижения требований к его характеристикам, возможность получения заданных динамических свойств системы при малых весах и габаритах исполнительных управляющих устройств. К релейным законам управления часто обращаются и в тех случаях, когда необходимо обеспечить высокую точность режима слежения
на так называемых ползучих скоростях [3].
Релейные автоматические системы обладают высоким быстродействием вследствие того,
что управляющее воздействие в них изменятся практически мгновенно, «скачком», и исполнительное устройство подвержено максимальному постоянному воздействию. Структурную схему релейной системы обычно изображают следующим образом (рис. 1).
f(t)
B0
хk
M (t)
x(t)
U
РР
W 1(s)
Р и с. 1. Структурная схема релейной системы
Здесь W1(s) – передаточная функция объекта, объединенного с датчиком и исполнительным механизмом, РР – релейный регулятор, так что управляющее воздействие U(t) действует
непосредственно на объект.
В простейшем случае управление U(t) определяется отклонением регулируемой координаты х(t) от своего заданного конечного состояния хk и принимает лишь два значения +В или – В,
которые соответствуют предельным значения управления при переключениях релейного регулятора. В общем же случае оно может зависеть и от иных величин, характеризующих состояние объекта (от производных, интегралов отклонения и пр.) [2, 4].
Управление U(t) как уравнение релейного регулятора можно записать следующим образом:
U(t) Ф(t)) + В0,
где Ф(t) – оператор, зависящий от вида статической характеристики релейного регулятора, которая определяется функцией переключения М(t), действующей на его входе, В0 – постоянная
величина (смещение), необходимость введения которой обусловлена стремлением повысить
точность управления в установившемся режиме работы объекта без астатизма или обеспечить
5
симметричность автоколебаний регулируемой координаты возле заданного конечного состояния. Смещения может и не быть.
В соответствии со структурной схемой (рис. 2) объект управления предполагается линейным и задается передаточной функцией
R(s)
W (s)
,
P(s)
а движение объекта описывается линейным дифференциальным уравнением следующего вида:
P( p) x(t ) R( p)U (t ) ,
где p – оператор дифференцирования d / dt .
Предполагается также, что многочлен P(s) (исходя из физической реализуемости) имеет
более высокую степень, чем многочлен R(s).
В релейных системах колебательный переходный процесс может вырождаться в так называемый скользящий процесс. В этом случае изображающая точка (ИТ) в фазовом пространстве
системы оказывается на многообразии М(t)=0 и движется вдоль него в заданное конечное значение без перерегулирования. Порядок системы дифференциальных уравнений, описывающих
это движение, всегда на единицу меньше исходной системы [9]. Однако реализация подобного
движения помимо измерения выходной координаты объекта х(t) требует доступа и к другим
переменным состояния (в частности, измерения производной х(t)).
В данной статье исследуются процессы в релейных системах, управление в которых построено с использованием в обратной связи экстремумов регулируемой координаты [5], что
позволяет существенно повысить его эффективность без применения в законе управления производных, а также организовать квазискользящие процессы в системе.
Пусть линейная часть системы имеет передаточную функцию
K0
,
(1)
W ( s)
s (T0 s 1)
а движение объекта описывается линейным дифференциальным уравнением вида
(T0 p 2 p) x(t ) k U (t ) ,
(2)
d
.
dt
Подобное уравнение в первом приближении имеют электромеханические объекты, системы вентиляции и отопления, следящие системы [6, 7].
В качестве нелинейной части будем использовать двухпозиционный регулятор [8]
(3)
U (t ) В sign( M (t ))
с функцией переключения
M (t ) xk k ( x1e (t ) xk ) x1 (t ) ,
(4)
где x1e ( t ) – экстремальные значения регулируемой
xk
координаты (ее максимум x1max (t ) или минимум
u
B
xk+k(x 1m ax -xk)
x1min (t ) ); k – постоянный коэффициент, -1<k<1;
sign – знаковая функция, принимающая значения +1
или –1 в зависимости от знака функции переключения
xk+k(x 1m in -хk)
M ( t ) ; В – величина управляющего воздействия.
x (t)
где p
1
Из соотношения (4) видно, что величина
(
x
(
-B
1e t ) xk ) ) есть не что иное, как амплитуда входного сигнала, а сама функция М(t) на протяжении управления при переводе объекта из заданного начального
Р и с. 2. Статическая характеристика регусостояния в предписанное конечное может менять
лятора с отрицательным переменным гизнак не менее чем один раз. Статическая характеристерезисом
стика регулятора для случая, когда 0<k<1, представлена на рис. 2.
Это релейный регулятор с отрицательным переменным гистерезисом, ширина которого поставлена в линейную зависимость от амплитуды автоколебаний.
6
Без потери общности анализа будем считать хk 0 и найдем сигнал, действующий на
входе релейного регулятора (функцию переключения)
M (t ) k x1e (t ) x1 (t ) .
Переключения управления происходят, когда функция М(t) обращается в нуль.
(5)
M (t ) 0 .
dx ( t )
Полагая в уравнении (2) x( t ) 1
x2 ( t ) , получим систему дифференциальных уравdt
нений
x1 (t ) x 2 (t ) ;
x 2 (t )
x 2 ( t ) K 0U ( t )
.
T0
T0
(6)
Движения изображающей точки (ИТ) на фазовой плоскости определяется соотношением.
T0 x2 (t )
dx1
.
dx2 K0 (t ) x2 (t )
(7)
Уравнение линии переключения (5) на фазовой плоскости представляет собой прямую, которая параллельна оси х2(t) и проходит через точку с координатами ( k x1e ( t ),0 ) .
Если функция переключения M (t ) k x1e (t ) x1 (t )) 0 , т.е. x1 (t ) k x1e (t ) , то изображающая точка (ИТ) находится справа от линии переключения, а управление U(t)= -В. Уравнение движения при U(t)=-В, полученное решением дифференциального уравнения (7), имеет вид
x1 (t ) T0 ( x2 (t ) B K 0 ln( B K 0 x2 (t )) С .
(8)
Если М (t ) 0 , т.е. x1 (t ) k x1e (t) (ИТ слева от линии переключения), то управление
U(t)=+В, а уравнение движения
x1 (t ) T0 ( x2 (t ) B K 0 ln( B K 0 x2 (t )) С .
(9)
Понятно, что если в качестве линий переключения использовать уравнения фазовых полутраекторий (8) и (9), ведущих в начало координат фазовой плоскости, перевод ИТ из произвольного начального состояния в начало координат осуществлялся бы за одно переключение
релейного элемента, а управление было бы оптимальным по быстродействию.
Однако сложности реализации подобного управления, связанные главным образом с необходимостью измерения скорости выходной координаты в условиях помех, а также причины,
обусловленные приближенностью математического описания реального объекта и элементами
его неопределенности, вынуждают чаще всего отказываться от подобного решения и аппроксимировать эти полутраектории более простыми функциями [5, 9].
Если коэффициент k в функции переключения (6) подобрать или вычислить тем или иным
образом так, чтобы линия переключения (5) проходила через точки, расположенные на полутраекториях (8) или (9), ведущих в начало координат фазовой плоскости, то протекающие в
системе процессы также будут оптимальными по быстродействию. Следует обратить внимание
на то, что ИТ не может быть переведена управлением (3) в начало координат за одно переключение при движении ее из области начальных условий, расположенной между полутраекторией
(правее ее) (9), которая ведет в начало координат во втором квадранте фазовой плоскости, и
осью ординат, или из области, лежащей между полутраекторией (левее ее) (8), ведущей в начало координат, и осью ординат в четвертом квадранте. Для этого необходимо как минимум выполнить два переключения так, как показано на рис. 3. Движение ИТ на этом рисунке начинается из точки «с». В точке «в» происходит первое переключение, а в точке «а» – второе. Это
обусловлено тем, что знак на первом интервале управления при использовании функции переключения (4) всегда отрицательный, если в начале управления ИТ располагается справа от оси
ординат, и положительный – в противном случае, тогда как знаки на первом интервале управления в вышеобозначенных областях при оптимальном по быстродействию управлении всегда
положительны и отрицательны соответственно. Поэтому в этих областях фазовой плоскости
управление (3) дополнительно один раз меняет знак.
7
Р и с. 3. Квазиоптимальные по быстродействию процессы:
1 полутраектория (8), 2 полутраектория (9), 3 линии переключения (5),
4 – фазовая траектория движения ИТ из т очки «с» в точку «а» и затем в начало координат
Р и с. 4. Фазовый портрет:
М(t) – линия переключения, 1 – фазовая траектория
Р и с. 5. Переходный процесс в релейной системе с отрицательным переменным гистерезисом:
u(t) управление, х(t) – регулируемая координата
Если коэффициент k в функции переключения (4) положить больше оптимального (так, чтобы линия переключения (4) проходила на фазовой плоскости правее линии «1» или левее линии
«2» на рис. 3), в системе всегда будут возникать квазискользящие процессы, как показано на рис.
4, а переходный процесс будет заканчиваться без перерегулирования (рис. 5). Движение на этих
8
рисунках начинается из некоторого начального состояния в начало координат. Подобное движение обусловлено тем, что ИТ в момент переключения не может остаться на линии переключения
(как это имеет место в релейных системах с линейной функцией переключения [6, 9]), а продолжает двигаться по траектории (9) до момента пересечения траекторией оси абсцисс.
Появление экстремума регулируемой координаты приводит к скачкообразному перемещению линии переключения М(t) левее этого экстремума, и управление (8) вновь меняет знак. В
результате в системе возникает квазискользящий процесс. В конечном состоянии управление
удерживает ИТ в начале координат фазовой плоскости
В заключение отметим, что использование релейного регулятора (3) в системах управления
динамическими объектами позволяет существенно упростить техническую и алгоритмическую
реализацию управления, наделить систему адаптивными свойствами к действию сигнальных
возмущений и реализовать в системе второго порядка (при некоторых несущественных для
практики ограничениях) оптимальное по быстродействию управления с использованием только
выходной координаты или ошибки системы.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Фалдин Н.В. Релейные системы автоматического управления. Математические модели, динамические характеристики и анализ систем автоматического управления / Под ред. К.А. Пупкова, Н.Д. Егупова. М.: МГТУ им. Баумана, 2004. С. 573-636.
2. Цыпкин, Я.З. Релейные автоматические системы. / Я.З. Цыпкин // М.: Наука, 1974. 704 c.
3. Руднев С.А., Фалдин Н.В. Исследование периодических движений в релейных системах, содержащих звенья с
ограничителями // Изв. РАН. Теория и системы управления. 2007. №2. С. 15-27.
4. Бурляев В.В. Условия возникновения полигармонических колебаний в двухпозиционных регуляторах с отрицательным гистерезисом // Изв. вузов. Электромеханика. 1970. №6. С. 706-709.
5. Вохрышев В.Е. Метод диверсификации экстремумов фазовых координат в прикладных задачах синтеза управления динамическими объектами: Монография. Изд-во Самарского науч. центра РАН. Самара, 2004. 116 с.
6. Бесекерский В.А., Попов Е.А. Теория систем автоматического регулирования. М.: Наука, 1979. 767 с.
7. Kurman J. Ventilation and air conditioning // Landis and Staefa Basic Training. 1981. 234 c.
8. Пат. № 2302029 РФ. Регулятор с релейной характеристикой / В.Е. Вохрышев. Опубл. 2007. Бюл. № 18. С. 703.
9. Старикова М.В. Автоколебания и скользящий режим в системах автоматического регулирования. М.: Машгиз,
1962. 201 c.
Статья поступила в редакцию 28 февраля 2008 г.
УДК 621.6-52
И.А. Данилушкин, О.Н. Тимофеева
СТРУКТУРНОЕ ПРЕДСТАВЛЕНИЕ И ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
ПРЯМОТОЧНОГО ТЕПЛООБМЕННИКА*
Для прямоточного теплообменника, представленного в виде системы дифференциальных уравнений
в частных производных, методами структурной теории распределенных систем получены передаточные функции, описывающие влияние входов теплообменника на выходы.
Распределение температур греющего и нагреваемого агентов по длине прямоточного теплообменного аппарата описывается системой дифференциальных уравнений в частных производных [1]
Q1 ( x, t )
Q ( x, t )
v1 1
1Q1 ( x, t ) 21Q2 ( x, t ) Q1 ( x, t ) , 0 x l , t 0 ;
(1)
t
x
Q2 ( x, t )
Q2 ( x, t )
v2
2 Q2 ( x, t ) 12 Q1 ( x, t ) Q2 ( x, t ) ,
t
x
с соответствующими граничными
Q1 (0, t ) g1 (t ) ;
*
0 xl,
t0
(2)
(3)
Работа выполнена при финансовой поддержке РФФИ (грант 06-08-00041-а)
9
Q2 (0, t ) g 2 (t )
(4)
Q1 ( x,0) Q01 ( x) ;
(5)
Q2 ( x,0) Q02 ( x) .
(6)
и начальными условиями
Здесь Q1 ( x, t ) , Q2 ( x, t ) – распределение температур греющего и нагреваемого агента соответственно, v1, v2 – скорости потоков греющего и нагреваемого агентов. Коэффициенты 1 ,
2 являются коэффициентами теплообмена потоков с внешней средой; 12 и 21 – коэффициенты теплообмена между греющим и нагреваемым агентами и между нагреваемым и греющим агентами.
Структурная схема математической модели прямоточного теплообменника представлена
на рис. 1. Поскольку математическая модель разработана для дальнейшего синтеза системы
автоматического управления, то переходные блоки на входах и выходах позволяют осуществить связь распределённого объекта управления с «сосредоточенной» системой контроля.
Q01( x)
g1 ( p)
1 ( x, p)
(x)
12( x )
W2 ( x, , p )
( l )
( l )
W1 ( x, , p)
21( x )
Q2 (l , p)
Q1 (l , p )
Q1 ( x, p)
Q2 ( x, p )
(x)
2 ( x, p )
g 2 ( p)
Q02 ( x)
Р и с. 1. Структурная схема объекта управления
Согласно [1], передаточные функции W1 ( x, , p) и W2 ( x, , p ) имеют следующий вид:
W1 ( x, , p)
1( x ) b1 ( x)
, v1 0 ;
e
v1
(7)
W2 ( x, , p)
1( x) b2 ( x )
, v2 0 ,
e
v2
(8)
где 1( x ) – единичная функция:
0, npu x ,
1( x )
1, npu x ,
а коэффициенты b1 и b2 определяются выражениями
1
1
b1 p 1 21 ,
b2 p 2 12 .
v1
v2
(9)
Структурную схему теплообменника, изображенную на рис. 1, можно представить в виде,
показанном на рис. 2, получив с помощью методов структурной теории распределённых систем
выражения для передаточных функций.
Здесь Wij ( x, , p) – передаточные функции теплообменника от входа i ( x, p) к выходу
Q j ( x, p) ; i 1, 2 , j 1, 2 .
Передаточные функции матрицы Wij ( x, , p) могут быть найдены путём решения соответствующих интегральных уравнений. При этом, благодаря симметрии задачи, достаточно найти
выражения для передаточных функций W11( x, , p) и W21( x, , p) , а передаточные функции
10
W22 ( x, , p) и W12 ( x, , p) можно будет получить с помощью круговой замены индексов 12,
21. Поэтому далее будет рассматриваться только задача нахождения передаточных функций
W11( x, , p) и W12 ( x, , p) .
1 ( x, p)
Q1 ( x, p)
W11( x, , p)
W12 ( x, , p)
W21( x, , p )
2 ( x, p )
Q2 ( x, p)
W22 ( x, , p )
Р и с. 2. Упрощенная структурная схема теплообменника
Передаточная функция W11( x, , p) является решением следующего интегрального уравнения [1]:
l l
W1 ( x, , p) 12 21 W1 ( x, , p) W2 (, , p)d W11(, , p)d W11( x, , p) .
0 0
(10)
Путём подстановки в (10) выражений (7), (8) для W1 ( x, , p ) и W2 ( x, , p ) было получено
интегральное уравнение Фредгольма второго рода [1]
12 21
e b1 ( x )
.
W11( x, , p)
1( x ) e b2 ( x ) e b1 ( x ) W11(, , p) d 1( x )
v1v2 b1 b2 0
v1
l
(11)
В [1] приведено решение интегрального уравнения (11) путём приведения его к уравнению
с интегралом свёртки. Полученное решение имеет неудобный для анализа вид. Поэтому в данной работе приводится решение уравнения (11) как уравнения с вырожденным ядром [2].
Поскольку в рассматриваемой модели теплообменника возмущение может быть внесено
только изменением температуры на входе, то для упрощения решение уравнения (11) искалось
при 0 . Тогда решаемое уравнение принимает вид
12 21
e b1x
.
e b2 ( x ) e b1 ( x ) W11(,0, p) d
v1v2 b1 b2 0
v1
x
W11( x,0, p)
Ядро уравнения можно представить в виде конечной суммы произведений пар функций,
одна из которых зависит только от х, другая – от η:
e b2b2 x e b1b1x
2
uk ( x) hk () .
k 1
Здесь
u1 ( x) e b2 x ,
u 2 ( x) e b1x ,
h1 () e b2 ,
h2 () e b1 .
Решение интегрального уравнения (11) ищется в виде [2]:
W11( x,0, p) f ( x, p)
2
uk ( x) Ak ( p) ,
(12)
k 1
12 21
1
где f ( x, p) e b1x ,
. Функции Ak ( p ) определяются из системы алгебраичеv1v2 b1 b2
v1
ских линейных уравнений
11
Am ( p)
2
sm k Ak ( p) f m ( p) ,
k 1, 2 ,
m 1, 2 ,
(13)
k 1
где
l
l
sm k hm () u k () d ,
0
k 1, 2 .
m 1, 2 ,
f m ( p) hm () f (, p) d ,
(14)
0
Расчет коэффициентов (14) приводит к следующим результатам:
1
1
s11 l ,
s12
e b1b2 l 1 ,
s21
e b1b2 l 1 ,
b1 b2
b1 b2
f1 ( p)
1
e b2 b1 l 1 ,
v1 b1 b2
f 2 ( p)
s22 l , (15)
l
.
v1
(16)
Подставляя (15), (16) в систему (13), получаем выражения для функций Ak ( p ) :
A1 ( p)
1 e
v v
(b2 b1 )l
b2 b1 2 e (b2 b1 )l
2 2
1 2
v v
1
2
2
e (b2 b1 )l b1 b2 3
2 2
2 2
b2 b1 2 12
2121l 2 12
211 e (b2 b1 )l
,
2
(17)
b1 b2 v1v2le (b2 b1 )l (b1 b2 ) 3 12 21l 2 e (b2 b1 )l b1 b2 2 12 21(e (b2 b1 )l 1) 2 v2
A2 ( p )
.
2
2 2 2
2 2
b2 b1 2 e (b2 b1 )l v 21v 2 2 (b2 b1 ) 2 12
21l 12
21 1 e (b2 b1 )l
(18)
Далее, подставляя (17) и (18) в (12), получим выражение для W11 ( x,0, p ) в точке x=l (на выходе теплообменника):
12 21
1
1
(19)
W11(l ,0, p) e b1l
v1
v1 v1v2 b1 b2
1 el (b2 b1 ) v1v22 el (b2 b1 ) b1 b2 3 e lb2
2 (b2 b1 )l 2 2
2 2 2
2 2
v1 v2 (b2 b1 ) 2 12
21l 12
21 1 e (b2 b1 )l
b2 b1 e
2
b1 b2 v1v2 el (b2 b1 ) l b1 b2 3 12 21 b1 b2 2 l 2 el (b2 b1 ) 1 el (b2 b1 )
2
2 2 2
2 2
b2 b1 2 e (b2 b1 )l v12 v22 (b2 b1 ) 2 12
21l 12
21 1 e (b2 b1 )l
v2 e
b1l
2
.
Передаточная функция W21 ( x, , p ) находится путём решения интегрального уравнения
l
l l
21 W1 ( x, , p) W2 (, , p)d 12 21 W1 ( x, , p) W2 (, , p)d W21 (, , p)d W21 ( x, , p) . (20)
0
0 0
Выполняя такую же, как и для W11 ( x, , p ) , последовательность действий, запишем передаточную функцию W21( x, l , p) .
W21 ( x,0, p)
12 21
l
v1v 2 b1 b2
e b2 ( x ) e b1 ( x ) W21 (,0, p) d
0
21 e b2 x e b1x
v1v 2 b1 b2
.
(21)
После решения интегрального уравнения (21) получаем выражение для W21 (l ,0, p ) :
W21(l ,0, p)
12
21
e b2 (l x) e b1 (l x)
v1v2 b1 b2
(22)
2112
22112 b1 b2 3 2b1 b2 le l (b1 b2 ) e 2l (b1 b2 ) 1
v1v2 b1 b2 b b 2 e l (b1 b2 ) v 2 v 2 b b 4 2 2 l 2 2 2 1 e l (b1 b2 )
1
2
1 2 1
2
21 12
21 12
2
.
Круговая замена индексов в выражениях (19), (22) позволяет записать выражения для передаточных функций W22 ( x, , p) и W12 ( x, , p) :
W22 (l ,0, p)
12 21
1 b2l 1
e
v2
v2 v1v2 b2 b1
(23)
1 e l (b1 b2 ) v2 v12 e l (b1 b2 ) b2 b1 3 e lb1
2 (b1 b2 )l 2 2
2 2 2
2 2
v1 v2 (b2 b1 ) 2 12
21l 12
21 1 e (b1 b2 )l
b2 b1 e
2
b2 b1 v1v2 el (b1b2 ) l b2 b1 3 12 21 b1 b2 2 l 2 el (b1b2 ) 1 el (b1b2 )
2
b2 b1
2 (b1 b2 )l
e
v v
2 2
1 2 (b2
W12 (l ,0, p)
2 2 2
2 2
b1 ) 2 12
21l 12
21 1 e (b1 b2 )l
2
.
(24)
2
2112
12
21b2 b1 3 2b2 b1 le l (b2 b1 ) e 2l (b2 b1 ) 1
v1v2 b2 b1 b b 2 e l (b2 b1 ) v 2 v 2 b b 4 2 2 l 2 2 2 1 e l (b2 b1 )
1
2
1 2 1
2
21 12
21 12
b2l
12
e b1 (l x) e b2 (l x)
v1v2 b2 b1
v1e
2
.
Выражения (19), (22)-(24) могут быть в дальнейшем использованы для моделирования
прямоточного теплообменника, например, в среде численного моделирования Matlab.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
Бутковский А.Г. Структурная теория распределенных систем. М.: Наука, 1977.
Манжиров А.В., Полянин А.Д. Справочник по интегральным уравнениям: Методы решения. М.: Изд-во «Факториал Пресс», 2000. 384 с.
Статья поступила в редакцию 14 марта 2008 г.
УДК 681.3
Р.В. Демьяненко
МЕТОД ПРОСТРАНСТВЕННОГО АНАЛИЗА ТОПОЛОГИИ
АВТОТРАНСПОРТНОЙ СЕТИ
Рассматриваются основные концепции и существующие методы автоматизации построения моделей транспортных сетей. Приводятся метод и этапы автоматического построения модели
улично-дорожной сети. Предложенный метод анализа топологии сети базируется на методе
трассирующих лучей.
Введение
Компьютерные модели автотранспортных сетей, полученные на базе космических снимков
или построенные вручную, находят применения во множестве сфер деятельности человека:
управление дорожным движением, грузоперевозки, навигация транспортных средств (ТС), муниципальное планирование развития и учета состояния сетей и т.п. В настоящее время существуют различные направления решения задачи автоматического построения модели транспортной сети: нейронные сети, генетические алгоритмы, базы знаний, семантическая модель и
т.д.
Одним из традиционных методов является распознавание дорожной сети на растровых
изображениях – аэро- и спутниковых фотоснимках. Данный метод во многом зависит от качества исходных фотографий и предполагает наличия большого количества избыточных снимков
одних и тех же участков сети для улучшения качества распознавания. Кроме того, метод позволяет построить только слабодетализированную сеть [1].
13
Второй метод заключается в оснащении большого количества транспортных средств
(например, специализированных ТС) GPS-приборами и средствами автоматического сбора
данных траекторий движения транспортных средств. Информация собирается в центральной
базе данных, где обрабатывается специализированными алгоритмами. С течением времени количество накопленных данных растет, и модель транспортной сети автоматически детализируется и уточняется. К преимуществам такого
подхода можно отнести высокую точность
получаемой модели и возможность сбора дополнительных данных (интенсивность движения, средняя скорость, среднее время простоя
и т.п.). К недостаткам подхода относятся:
необходимость использования дорогостоящего оборудования в больших количествах,
фрагментация модели и большие временные
затраты (быстро строится генерализованная
Р и с. 1 . Фрагмент электронной карты города с
модель сети по магистральным улицам с маквыделенным объектом слоя «проезжие части»
симальной интенсивностью движения, дальнейшая детализация модели по прилагающим улицам строится с затуханием по логарифмическому закону). Таким образом, комплексность характеристик транспортной сети и сложности
самой задачи оставляет нерешенной проблему автоматического построения модели транспортной сети необходимого уровня детализации.
В работе предлагается метод автоматического построения специальной математической модели улично-дорожной сети (УДС) на основе имеющихся данных на электронной карте города
(используются геометрические параметры слоя «проезжие части») [2]. Для применения данного
метода необходимым условием является наличие детализированный векторной электронной карты города, содержащей слои с различными типами объектов (рис. 1).
Модель улично-дорожной сети
Ж/д переезд
Улица 1
пеУзел
Ул
ица 5
Пешеходный
реход
Перекресток
Дуга
Участок
Перегон
Улица 3
а
Улица 4
Улица 2
б
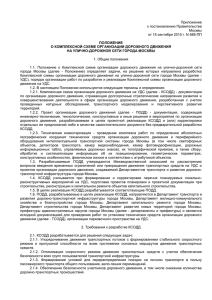
Р и с.2 . Геоинформационная модель УДС:
а фрагмент УДС; б соответствующий фрагмент модели УДС
В рамках проектирования и реализации интеллектуальной транспортной системы
г. Самары разработана специальная математическая модель улично-дорожной сети с использованием геоинформационных технологий [3]. Такая модель УДС (рис. 2) служит информационной основой подсистем интеллектуальной транспортной системы, которые решают широкий
спектр задач, связанных с организацией дорожного движения, таких как задачи управления и
распределения транспортных потоков, оптимизация грузоперевозок, экспертная дислокация
14
дорожных знаков и светофоров и др. Основой модели УДС являются объекты трех базовых
типов: участки, узлы и дуги. Участок – это область проезжей части, характеризующаяся атрибутами, постоянными в любой точке объекта. Участки делятся на перегоны, перекрестки, железнодорожные переезды и пешеходные переходы. По форме перегоны можно разделить на
линейные участки, повороты, тупики и расширения/сужения. Узел – точка, соединяющая два
соседних участка в направлении движения ТС, точка возможного разделения или соединения
транспортных потоков. Дуга – направленная линия, соединяющая два узла. Дуга обозначает
направление движения транспортного потока. Узлы и дуги составляют ориентированный граф,
описывающий все возможные варианты движения транспортных потоков.
Метод автоматизированного построения модели УДС
Под автоматизированным построением модели УДС понимается процесс, состоящий из
следующих этапов.
1. Автоматическое построение осевых (срединных) линий проезжих частей.
2. Автоматический поиск перекрестков (мест пересечения осевых).
3. Автоматическое разбиение слоя «Проезжая часть» на участки дорожной сети согласно
предложенной модели УДС (построение слоя «Участок»).
4. Автоматическое построение графа транспортной сети (слои «Узел» и «Дуга») с привязкой к слою «Участок».
5. Ручная коррекция модели транспортной сети.
6. Автоматическое заполнение атрибутивных полей слоев «Участок», «Узел», «Дуга».
Первые два этапа не представляют алгоритмической сложности и могут быть пропущены в
зависимости от наличия данной информации в исходной электронной карте города.
На 5-м этапе построенная модель при необходимости подвергается ручному корректированию. Это единственный этап, требующий работы оператора. На этом этапе модели придаются такие свойства, которые невозможно определить автоматически, например, наличие одностороннего движения на какой-либо улице, наличие пешеходного перехода вне перекрестка
или отсутствие пешеходного перехода на перекрестке. При необходимости данный этап возможно автоматизировать. Для этого требуется разработка специализированных технических
средств автоматического сканирования и распознавания установленных технических средств
организации дорожного движения (дорожных знаков, светофоров, разметки).
Наибольшую алгоритмическую сложность представляет процесс построения слоя «Участок» [2], заключающийся в анализе слоя «проезжие части» и итерационном выделении из этого слоя объектов (полигонов), подходящих под определенный паттерн.
На 4-м этапе происходит построение орграфа транспортной сети и формирование логики
взаимоотношений объектов модели УДС, т.е. топологии.
Алгоритм анализа топологии на основе метода трассировки
Пространственный метод построения слоя «Участок» использует подход построения трассирующих лучей [4] в ключевых точках слоя «Проезжая часть» электронной карты. Ключевые
точки – это центры перекрестков, центры поворотов и другие точки карты, в которых наблюдается нелинейность осевой либо пересечение осевых. Ключевые точки могут быть найдены
различными способами. Например, точки пересечения осевых линий проезжих частей на перекрестках или «крутых поворотах».
Метод трассировки применяется в основном при моделировании освещения изображений
в трехмерной графике. В геоинформационных системах (ГИС) метод трассировки лучей используется для векторизации растровых изображений. Обобщенно метод трассировки лучей
может применяться для анализа «окружающей обстановки» относительно определенной точки
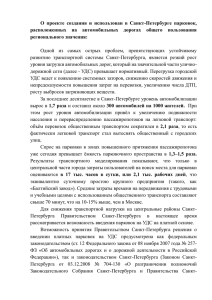
с целью извлечения пространственной информации. Под пространственной информацией понимается расположение границ областей с определенными (искомыми) характеристиками относительно центра исследования. Алгоритм, реализующий данный метод, находит условно локальную область с постоянными характеристиками, отличными от характеристик других областей. Метод основан на трассировке пространства вокруг центра при помощи лучей, заданных
функциями определенного вида и условиями финитности лучей (рис. 3).
Алгоритм метода заключается в следующем.
15
Шаг 1. Выбирается центр. Центр может быть выбран исходя из условий задачи (например, центр масс однородного полигона). В этом случае решается задача поиска области трассировки. В других случаях может решаться обратная задача. В рассматриваемом случае в качестве центра выбираются ключевые точки. В каждой точке определенной области строится область трассировки. Этот процесс продолжается до тех пор, пока область не будет удовлетворять заданным критериям. Пусть центр будет в точке O с координатами (X0,Y0) для двумерной
плоскости.
Шаг 2. Из центра строятся расходящиеся лучи, отстоящие друг от друга на угол Ai,i+1. Лучи нумеруются от 1 до N, где N – число лучей. Каждому лучу соответствует некоторая функция
fi – зависимость одной координаты от другой,
которая может быть представлена в полярных,
декартовых или других координатах. На рис. 3
показан простейший пример с лучами, которым соответствует линейная функция вида
y=kx+b. Стоит отметить, что функция fi может
иметь не только аналитический, но и произвольный (например, алгоритмический) вид.
Каждый луч строится из центра по закону fi и
прерывается при наступлении некоторого
условия финитности Fi. Функция Fi – некоторая предикатная функция, равная 0 на всей
Р и с. 3 . Визуализация метода трассировки
длине луча и равная 1 в точке его прерывания.
пространства
Функция Fi, например, может играть роль
определителя границ других областей или удаленности от центра. Угол Ai,i+1 определяет количество лучей для трассировки, следовательно, точность построения. Точность построения характеризуется относительной ошибкой , равной отношению площади пересечения трассированной области Str, представленной полигоном из периферийных вершин лучей, с реальной однородной областью S к площади этой реальной однородной области
Str S
.
S
Шаг 3. Записывается N пар значений (i, l), где i – номер луча, а l – его длина. Эти значения
представляют количественную характеристику окружающего пространства, сформированного
по заданным критериям около определенной точки.
Р и с. 4 . Длины лучей трассировки
Шаг 4. Для наглядности удобно представить пары значений в виде графика, где по оси
абсцисс показаны номера лучей, а по оси ординат – их длины (рис. 4). Отметим, что результатом применения данного метода могут быть не только пары (i, l), но и пары (i, l’), где l’ – относительная длина луча, равная отношению длины луча к максимально возможному значению
либо к максимальной длине луча в конкретном построении. Максимально возможная длина
луча lmax – это значение, ограничивающее построение луча в случае ненаступления другого
условия его финитности.
16
Рассмотрим применение описанного метода трассировки к задаче выделения перекрестков
на проезжих частях УДС.
Наличие правильно построенных осевых линий объектов слоя «Проезжая часть» обязательно для работы алгоритма автоматизированного построения модели УДС. В случае отсутствия слоя «Осевые улицы» его необходимо построить. Для этого нужно провести линеаризацию каждого объекта слоя «Проезжая часть» при помощи, например, алгоритма триангуляции
[5]. Затем необходимо совместить конечные точки получившихся полилиний, расположенных
на смежных линиях проезжих частей, так, чтобы в пределах одной улицы осевая линия была
непрерывна.
При применении метода трассировки на карте строятся лучи, исходящие из какой-либо
ключевой точки и имеющие определенную длину. Каждый луч прерывается при пересечении
границы объекта «Проезжая часть». За количественную характеристику окружающего точку
пространства можно принять вектор пар значений (i,li), где i – номер луча, а li – его длина.
Ключевая точка (например, центр
перекрестка) принимается за центр
полярных координат. Проведем из
центра лучи, равноотстоящие друг от
друга на угол . Исходящий от центра луч прервется на границе объекта
слоя «Проезжая часть» (на обочине)
или достигнет максимально установленной длины lmax (рис. 5). Условие
финитности будет задавать предикатная функция F(x,y), где (x,y) координата точки строящегося луча. F(x,y) = 0,
если точка с координатами (x,y) приР и с . 5 . Визуализация метода пространственного анализа
надлежит объекту слоя «Проезжая
часть», т.е. находится в границах полигона. F(x,y) = 1, если точка не находится на объекте
«Проезжая часть».
В случае применения метода трассировки пространства для слоя «Проезжая часть» график
длин лучей представляет собой совокупность двух или более всплесков, характеризующих лучи проезжей части (рис. 6). Число пиков (локальных максимумов) M и вид графика (паттерн)
определяет тип участка:
2 пика – линейный участок;
3 пика – Т-образный перекресток;
4 пика – Х-образный перекресток и т.д.
Р и с. 6 . Графики пространственной информации вокруг 6 ключевых точек
на разных перекрестках
Расстояние между максимумами ri,i 1 определяет характер участка. При M=2, если
ri,i1 N / 2 k n , то имеется линейный участок с поворотом. kn – коэффициент люфта, некоторое малое число, определяющее допустимое отклонение от прямой осевой линии линейного
участка, зависящее от числа N.
17
Построение геомоделей участков улично-дорожной сети на карте города
Задача выделения из проезжей части одного объекта слоя «Участок» сводится к преобразованию полученного графика (рис. 7 а) на основе соответствующего паттерна в график, определяющий границы объекта «Участок» (рис. 7 б). Зададим каждому лучу, построенному из
ключевой точки, фиксированную длину, полученную из преобразованного графика. Соединив
периферийные точки расходящихся лучей, получим объект слоя «Участок».
l, м
100
100
l, м
xi
60
60
20
а)
xj
N, ед
5
10
20
б)
N, ед
5
10
Р и с. 7 . Преобразование графика для одного всплеска:
а – до преобразования; б – после преобразования
Построение участка типа «Перекресток». Необходимо провести трассировку пространства, окружающего центр перекрестка (точка пересечения осевых), и преобразовать полученный вектор длин лучей в вектор, характеризующий перекресток. Для преобразования результирующего графика в объект-перекресток нет необходимости искать отсекающую кривую. Достаточно найти точки xi, xj (рис. 7 б). Отобразив эти точки на карту и соединив их прямыми,
получим линии отсечения объекта-перекрестка (рис. 8). Точки находятся путем отсечения графика по горизонтали линией y = k*lmin, где lmin – значение ближайшего минимума графика, а k –
некоторый коэффициент, найденный эмпирически.
Р и с. 8 . Модель «Участок-перекресток» на карте:
а исходная карта; б карта с объектом «Участок-перекресток»
Р и с. 9 . Модель «Участок-поворот» на карте:
а исходная карта; б карта с объектом «Участок-поворот»
Построение участка типа «Перегон». После выделения перекрестков необходимо заполнить промежутки между ними линейными участками. Далее для каждого линейного участка
нужно найти области поворота. Для этого строятся точки изменения направления при помощи
18
веерного алгоритма. Результатом работы алгоритма будет маркер поворота, если имеет место
крутой поворот, или маркер начала и маркер конца поворота в случае, если поворот пологий.
Проведя трассировку пространства и преобразования, аналогичные преобразованию для перекрестков, получим объекты-повороты (рис. 9). В случае трассировки двух маркеров необходимо удалить из рассмотрения пересекающиеся лучи, исходящие из разных центров.
Построение участка типа «Пешеходный переход». Рассматриваемые электронные карты
не обладали информацией о возможности расположения на проезжей части пешеходного перехода. В этой связи объект «Пешеходный переход» строится на каждом перекрестке, так как согласно Правилам дорожного движения и ГОСТу пешеходные переходы должны быть организованы на перекрестках либо в особых местах (например, около школ). На этапе ручной коррекции для несуществующих в реальном населенном пункте пешеходных переходов соответствующие автоматически построенные участки могут быть помечены как участки «Перегон».
Построение участка типа «Железнодорожный переезд». Железнодорожный переезд –
это участок, находящийся на пересечении железной дороги и проезжей части УДС. Расстояние
от границ участка до железнодорожных путей регламентировано ГОСТом. Для создания участка типа «Железнодорожный переезд» проводится трассировка пространства из места пересечения ж/д путей и проезжей части. Преобразования сводятся к получению графика, соответствующего буферной зоне около переезда.
Построение участка типа «Тупик». Для построения тупиков УДС необходимо исследовать срединные линии проезжих частей на смежность со срединными линиями других объектов
слоя «Проезжая часть». Из граничных точек, несмежных срединных линий производится трассировка пространства и выделение участка «Тупик».
Построение объектов типа «Узел». Узлы строятся на основе слоя «Участок» (рис. 2 б).
Таким образом, на этапе построения узлов УДС слой «Участок» должен быть полностью заполнен. Графическое представление узла – эллипс, расположенный на границе смежных участков в точке движения и возможного изменения направления транспортного потока. Двум
смежным участкам могут соответствовать один или два узла. В рассматриваемых электронных
картах отсутствует информация по организации дорожного движения на УДС, в частности, для
улиц, имеющих одностороннее движения, нет данных о разрешенном направлении движения
транспортных потоков. В связи с этим соединение двух участков проводится двумя узлами, что
дает возможность решать разнообразные задачи, связанные с управлением транспортными потоками, без изменения основной структуры модели УДС. Для нахождения точек установки узлов необходимо для каждой пары смежных участков найти линии смежности. Точки установки
узлов соответствуют ¼ и ¾ длины линии смежности, т.е. находятся в середине каждой из двух
полос движения. При наличии слоя «Улицы» может быть определена принадлежность узла к
конкретной улице.
Построение прямолинейных дуг. Прямолинейная дуга соединяет два узла на линейном
участке типа «Перегон». Дуга представляет собой полилинию с двумя вершинами, расположенными в центрах узлов. Дуга указывает направление движение транспортного потока
(рис. 2 б).
Построение дуг, имеющих радиус искривления. Криволинейные дуги представляют собой полилинии с более чем двумя вершинами. Дуги на линейных участках типа «Поворот» соответствуют границам буферной зоны около срединной линии участка. Ширина буферной зоны
равна половине ширины участка. Криволинейные дуги, описывающие изменение направления
движения на перекрестках или развороты, представляют собой линейную интерполяцию
окружности, соответствующей дуге (рис. 2 б).
Заключение
Проведенные исследования электронной карты г. Самары ГИС MapInfo методом трассирующих лучей показали наличие зависимости желаемой конфигурации и топологии объектов
слоя «Участок» от характера графика пространственной информации (рис. 6), количества и
взаимного расположения его максимумов, распределения «массы» графика.
Предложенный метод автоматического построения математической модели УДС позволил
построить геоинформационную объектную модель улично-дорожной и транспортной сетей
г. Самары, значительно сократив время, необходимое для заполнения базы данных относительно более чем 500 000 участков УДС. Это позволило решать задачи обеспечения подсистем интеллектуальной транспортной системы города необходимыми знаниями, касающимися про19
странственно-координированной информации, сократив необходимость ручного ввода данных.
Масштабы транспортных сетей современных городов, наличие большого количества анализируемой информации обусловливают актуальность и экономическую эффективность данной
разработки.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
4.
5.
Dell’Acqua F., Gamba P., Iodice A., Lisini G., Riccio D., Ruello G. Simulation and Analysis of Fine Resolution SAR
Images in Urban Areas, 2nd GRSS/ISPRS Joint Workshop on “Data Fusion and Remote Sensing over Urban Areas”,
URBAN 2003. P. 133-136.
Михеева Т.И. Построение математических моделей объектов улично-дорожной сети города с использованием
геоинформационных технологий // Информационные технологии. 2006. №1. С. 69-75.
Михеева Т.И., Демьяненко Р.В., Большаков А.С. Обобщенный метод проектирования модели улично-дорожной
сети / Математика. Компьютер. Образование: Тез. докл. ХIII международ. конф. М. – Ижевск: МГУ, НИЦ «Регулярная и хаотическая динамика», 2006. С. 78.
Кормен Т., Лейзерсон Ч., Ривест Р. Алгоритмы: построение и анализ. М.: МЦНМО, 2001. 960 с.
Михеева Т.И., Петряшина Ю.В. Алгоритмы триангуляции плоских областей по нерегулярным сетям точек /
Перспективные информационные технологии в научных исследованиях, проектировании и обучении (ПИТ2006). Труды науч.-техн. конф. с междунар. участ. Т.2. Самара, 2006. С. 48-54.
Статья поступила в редакцию 30 января 2008 г.
УДК 519.23
М.А. Евдокимов, В.А. Кузнецов
СЛУЧАЙНЫЕ КОЛЕБАНИЯ В УПРУГОЙ СРЕДЕ
Исследуется реакция упругой среды на воздействие гармонического колебания со случайной амплитудой и частотой. Задача моделирует работу источника колебаний.
В различных прикладных задачах, относящихся к расчетам колебаний в материальных
средах, параметры колебательных систем считаются детерминированными (неслучайными).
Однако весьма часто в реальности источник колебаний имеет случайную природу. В данной
работе изучаются перемещения в упругой среде, вызванные таким источником колебаний.
Рассмотрим в некоторой системе координат x = (x1, x2, x3) безграничную упругую среду,
подверженную некоторому динамическому (зависящему от времени t) воздействию при помощи массовой силы X(x, t) = (X1, X2, X3). Известно [1], что компоненты вектора перемещения
U(x, t) = (U1, U2, U3) в этом случае удовлетворяют уравнениям Ламе
1 2
2 2 U i ( )U j , ji X i 0 ,
c2 t
(1)
где по повторяющимся индексам ведется суммирование от 1 до 3, а запятая означает дифференцирование по пространственным координатам xi и xj. В уравнении (1) и – постоянные
Ламе, характеризующие свойства упругой среды, c2 – скорость распространения поперечной
волны, которая полностью определяется постоянными Ламе и плотностью среды, – оператор
Лапласа:
2
x12
2
x22
2
x32
.
Наряду с уравнением (1) компоненты вектора перемещения U удовлетворяют условию на
бесконечности, а также так называемым условиям излучения.
Условия на бесконечности означают следующее:
U 0 при R = x12 x22 x32 .
В качестве условий излучений для нестационарных задач упругости принимается принцип
причинности: в упругой среде должны отсутствовать перемещения вне области, ограниченной
передним фронтом волн, идущих от источников колебаний.
20
Будем предполагать, что в начальный момент времени (t = 0) упругая среда находится в состоянии покоя.
Для решения уравнения (1) можно использовать преобразование Лапласа по временной координате и преобразование Фурье по пространственным координатам. В результате получается
выражение (см. подробности в [2])
R
R
R
p
1 1
1 p c2 2 1
1 1 p c1
c2
c L L[ X j ]* 2
e
e
Ui(x, t) =
L L[ X i ]* e
R
2
4
R
p
, (2)
,ij
где L[f (t)] означает преобразование Лапласа функции f (t) (соответственно L–1 означает обратное преобразование), c1 – скорость распространения продольных волн в упругой среде, звездочка обозначает свертку по пространственным координатам в E3, т.е.
f (x, t)*g(x, t) =
f (y , t ) g ( x - y , t )dy .
E3
Задавая в (2) тем или иным образом массовую силу X, можно получить решения конкретных задач.
Пусть компоненты Xi массовой силы имеют вид
Xi = Ai1 (x1) (x2) (x3) (t),
(3)
где ij – символ Кронекера, (x) – дельта-функция Дирака, A – случайная величина, (t) – некоторая (возможно, случайная) функция времени. Другими словами, в начале координат упругой
среды в направлении оси x1 действует случайная сила.
Теперь легко показать [3], что
R
t
i1 A R R
1 p c2 i1 A
R
L L[ X i ]* e
(
t
)
d
t sin t ,
R
R 0
c2
R c2 c2
1
(4)
1, t 0,
0, t 0.
(t )
где
Таким же образом можно записать
1
L
L[ X i ]*
1
p2 R
p
e
R
c2
t
A (t ) R d ,
R
c2
0
t a, t a 0,
(t a)
0, t a 0.
где
Далее согласно (2) получим
t
A
R
R 2 2 1
R
R
i1
Ui(x, t) =
t
t
c
(
t
)
2
d . (5)
4 R c2 c2
xi x1 R 0
c1
c2
Легко проверить, что полученное решение (5) удовлетворяет уравнению (1), а также условиям на бесконечности и условиям излучения.
Рассмотрим вариант, когда (t) = sin t, т.е. сила в начале координат осуществляет случайное гармоническое воздействие с частотой на упругую среду, причем частота может
быть случайной величиной. Для этого случая получим вместо (5) формулу
Ui(x, t) =
A i1
R
R
t sin t
4 R c2
c2
21
c22
R
2 1
R 1 R 1
t t 2 sin t
xi x1 R
c1
c1 c1
R 1
R 1
R
t t 2 sin t .
c2 c2
c2
(6)
Для упрощения выкладок рассмотрим компоненту U3 в точке (0, 0, H). Производя дифференцирование в (6), вычислим затем перемещение U3(0, 0, H, t) = U3(H, t):
U3(H, t) =
H
3 Ac22
H 1 H 1
t
t
sin
t
2
c
c
4 H 4
1
1
c1
H 1 H 1
H
t t 2 sin t .
c2 c2
c2
(7)
Так как c1 > c2, то при t < H/c1 в рассматриваемой точке будут отсутствовать перемещения;
при H/c1 < t < H/c2 в рассматриваемой точке будут фиксироваться только продольные волны, и
тогда из (7) получим
U3(H, t) =
H
3 Ac22 1 H 1
t
sin
t .
4 H 4 c1 2
c1
(8)
При t > H/c2 в точке (0, 0, H) будут наблюдаться и продольные, и поперечные волны, и согласно (7)
U3(H, t) =
H 1 1
3 Ac22 H 1 1 2
H 1 1
sin
cos
t . (9)
2 c2 c1
2 c2 c1
4 H 4 c2 c1 2
Полученные формулы (7), (8) и (9) позволяют исследовать закон распределения случайного перемещения U3(H, t).
Если амплитуда A есть случайное число, а частота является неслучайной, то, как видно
из приведенных выражений, закон распределения перемещения U3(H, t) совпадает с законом
распределения случайной величины A и у них будут отличаться только числовые характеристики.
Если случайной является частота колебаний , а амплитуда A – неслучайное число, то достаточно сложно найти точный закон распределения для U3(H, t), но наличие расчетных формул (7), (8) и (9) дает возможность смоделировать закон распределения случайного перемещения, если, конечно, известен закон распределения для .
Пусть случайными будут и амплитуда, и частота колебаний, причем известен их совместный закон распределения. В этом случае также достаточно несложно на основе метода статистических испытаний (метод Монте-Карло), получить нужную информацию о случайном перемещении U3(H, t) в любой момент времени.
Заметим, что не представляет затруднений рассмотрение перемещений в любой другой
точке и нахождение для них законов распределения. При этом будут более громоздкими расчетные формулы типа (7), (8), (9), но принципиальных сложностей при этом не возникает.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Новацкий В. Теория упругости. М.: Мир, 1975. 872 с.
2. Кеч В., Теодореску П. Введение в теорию обобщенных функций с приложениями в технике: Пер. с румынского. М.: Мир, 1978. 519 с.
3. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров: Пер. с английского. М.:
Наука, 1970. 720 с.
Статья поступила в редакцию 7 марта 2008 г.
22
УДК 629.78: 531.383
В.П. Макаров, Е.И. Сомов
ДИАГНОСТИКА СОСТОЯНИЯ И РЕКОНФИГУРАЦИЯ
ОТКАЗОУСТОЙЧИВЫХ ГИРОСИЛОВЫХ СИСТЕМ УПРАВЛЕНИЯ
КОСМИЧЕСКИХ АППАРАТОВ*
Рассматриваются методы выявления причин аномального функционирования автоматических систем управления и практические приемы предотвращения развития аномальных ситуаций, методы
последовательной классификации отказов бортовой аппаратуры систем и реконфигурации контура управления. Приводятся некоторые результаты анализа гиросиловых систем управления ориентацией космических аппаратов землеобзора.
Введение
Проблема обеспечения отказоустойчивости и динамической надежности является актуальной для обширного класса автоматически управляемых механических систем в машиностроении, энергетике, аэрокосмической технике и т.д. Отказ какой-либо аппаратуры в контуре
управления принципиально изменяет структуру системы, может привести к развитию в ней
аварийной ситуации. В работе представлены методы логико-динамического моделирования
управляемых механических систем с возможным нарушением структуры, критерии диагностирования состояния, методы принятия решения об отказе, практические приемы реконфигурации контура управления. Приводятся некоторые результаты анализа гиросиловых систем
управления космических аппаратов (КА) наблюдения Земли из космоса.
Моделирование логико-динамического управляемого объекта
Обобщенный нелинейный управляемый объект с вектором состояния x(t ) H R n принимается [1] в виде
D x(t ) Fo (x(t ), u, p(t , x), f (t )), x(t0 ) x0 ; t Tt0 [t0 , ) ;
(1)
z o (t ) o (x(t ), y (t ), p(t , x)) ,
(2)
y (t ) o (x(t ), f (t )) ;
s
где D – символ правой производной по времени; x 0 H0 H ; y (t ) R rν – вектор измерения
f
состояния объекта, используемый также и для диагностики; вектор-функция z o (t ) R rν описывает условия возникновения отказов и последующего развития аварийной ситуации;
c
u {u j } U R rν является вектором управления, а p(t , x) – вектор-функцией возмущений.
Вектор логических переменных f (t ) B m B B B , B (0, 1) представляет собой выход асинхронного логического автомата (АЛА) A f с памятью для генерации возможных отказов
f f ( f , l f ) ; f f ( f , l f ), f f (), f f (0) ; l f l f () g f (z o (tf )) ,
1
0
(3)
где t f – моменты времени возникновения отказа и начала развития аварийной ситуации, причем автоматное время N 0 [0,1,2,...) связано с непрерывным временем t соотношением
t tf ( f tf ) ; f f [tf , tf1) , вектор l f (t ) const t f , и изменение логического
вектора f приводит к изменению размерностей векторов x(t ) и y (t ) в моменты времени
t t f при нелинейных непрерывных отображениях x(tf ) Px (x(tf )) и y (tf ) Py (y (tf )) .
Работа поддержана РФФИ (07-08-97611, 08-08-99101), Президиумом РАН (программа фундаментальных исследований №22) и Отделением энергетики, механики, машиностроения и процессов управления РАН (программы
№15 и №18).
*
23
Задачи диагностики и реконфигурации управления
Пусть заданы фиксированные кратные периоды дискретизации Tu , Tq Tu и Tr Tu соответственно управления, измерения и реконфигурации. Будем использовать обозначения
xk x(tk ); tk kTu ; ts sTq ; t Tr и x kf FTu (x s ) , x f FTr (x k ) , где xkf является значением
вектора x s , измеренного с периодом дискретизации Tq и отфильтрованного к моменту времени
t k , а FTy () – оператором цифровой фильтрации с периодом дискретности Ty , y u,r .
Пусть также заданы подсистемы дискретного измерения состояния управляемого объекта
и цифровой фильтрации доступных измерений:
- для диагностики состояния объекта
d
y ds d (y s ) ; z df
k FTu (y s ) , k , s N 0 ;
(4)
- для формирования управления и его реконфигурации
y us u (y s ) ; y kf FTu (y us ) ; z f FTr (z df
k ) , , k , s N 0 .
(5)
Основные задачи диагностики и реконфигурации управления состоят в синтезе:
- синхронного логического автомата (СЛА) A d с памятью для диагностики объекта
dk d ( dk , l dk ) ; dk 1 d ( dk , l dk ) ,
с логическими векторами состояния
dk
, входа
l dk
g
d
(z df
k
0d d (t0 ) ,
) и выхода
dk
(6)
;
- синхронного логического автомата A реконфигурации, также с памятью, для описания
процессов блокирования аварийной ситуации и реконфигурации контура управления
r
r r ( r , l r ) ; r 1 r ( r , l r ) ,
0r r (t0 ) ,
(7)
при логических векторах состояния r , входа l r g r (z kf , df ) с df FTr (z dk ) и выхода r ;
- нелинейного закона управления
uk U(xek , y efk , y ok , r ) ;
xek 1 Fe (xek , y efk , y ok , uk , dk , r ) ,
x e0 x e (t0 ) , , k N 0
(8)
с его реконфигурациями в соответствии с выходными сигналами СЛА A r . Здесь
u e
e
e
o e d
y ef
k FTu ( e (y s )) ; y s e ( x s , k ) , вектор x s R
n eμ
является вектором состояния упрощенной
дискретной модели объекта
xes 1 Fe (xes , u k , dk , r ) ; xe0 xe (t0 ) ,
(9)
ne
где вектор x ek x e (tk ) R μ – его оценка, размерность neμ n max{n } , вектор y ok представ-
ляет программное движение по выходу.
Замкнутые логико-динамические контуры (4) – (9) предназначены для отказоустойчивого
управления объектом (1) – (3), когда обеспечивается выполнение его целевых задач при возможных физических отказах аппаратуры основного контура управления, иногда с временным
перерывом для восстановления работоспособности.
Схема синтеза логических автоматов диагностики
В наиболее совершенных механических управляемых системах, например, в системах
управления движением (СУД) КА информационного назначения (спутников связи, навигации,
наблюдения за объектами на поверхности Земли и т.д.) применяется трехуровневая диагностическая схема, реализованная с помощью бортовой вычислительной техники:
1) на нижнем уровне – СЛА Add , встроенные непосредственно в бортовые приборы для
автоматического мониторинга их состояния на основе измерения и оценки физических переменных (токов, напряжений, механических перемещений, скоростей и т.д.);
2) на среднем уровне – СЛА Acd для диагностики состояния каналов управления (рыскания, крена, тангажа, контура управления панелями солнечных батарей и т.д.);
24
3) на высшем «системном» уровне – СЛА Ad для диагностики СУД КА в целом.
На двух последних уровнях выполняется функциональная диагностика с использованием
эталонных моделей – на основе сравнения выходных сигналов моделей и фактического функционирования, т.е. измеренных значений координат состояния системы [2].
Результаты анализа процесса диагностирования состояния СУД, проводимого специалистами центра управления полетом КА, указывают на высокую эффективность методов, основанных на использовании детальной информации о приборах, алгоритмах управления, законах
движения КА и множестве других элементов процесса его функционирования, а также некоторых инвариантных соотношений между переменными состояния системы. Неисправность СУД
проявляется в рассогласовании характеристик (координат) процесса управления реальной системы и ее эталонной модели на величину, превышающую априорно известные ошибки измерений датчиков и отработки управляющих воздействий исполнительными органами. Характер
и значения указанных рассогласований позволяют выдвинуть конечное число гипотез, объясняющих неисправность с глубиной, достаточной для принятия решения по управлению резервами. Каждой гипотезе соответствует ветвь АЛА A f (3), описывающая возникновение отказа и
развития аварийной ситуации в объекте (1), (2). Для каждой такой ветви сначала с помощью
инженерных методов разрабатывается логическая таблица истинности процесса диагностирования, на основе которой далее стандартными компьютерными методами выполняется синтез
соответствующего синхронного логического автомата. Конкретный пример построения простейшего СЛА диагностики состояния СУД КА в виде логической функции выбора (ЛФВ)
представлен в [3].
Диагностика с использованием модифицированного критерия Вальда
Реализация на программном уровне (в БЦВМ бортового комплекса управления КА) любой
схемы автоматической локализации отказов системы связана с необходимостью решать задачу
выбора информативных параметров. На практике обычно в число контролируемых параметров
системы включают все значимые координаты ее состояния, которые характеризуют основные
динамические показатели и определяют качество функционирования верхнего уровня иерархии, в частности бортового комплекса управления КА.
Бортовой алгоритм диагностики СУД, использующий ее эталонную модель, работает в
фоновом режиме, т.е. при управлении движением КА в реальном масштабе времени. При этом
для выявления аномальной ситуации на каждом периоде контроля сначала вычисляется вектор
невязок E {ei } X Xm между компонентами векторов измеренных X {xi } и модельных
X m {xim } информационных параметров.
Затем полученные данные оцениваются в отношении соответствия их выбранным критериям, в простейшем случае – принадлежности области с границами допустимого изменения
контролируемых параметров, априорно определяемых исходя из проектных характеристик.
Основным недостатком схемы автоматической диагностики текущего состояния системы (в
реальном масштабе времени) с помощью ЛФВ, рассмотренной в [3], является сложность получения (априорного задания) оценки достоверности принятия решения об отказе структурного
элемента системы и ее зависимости от количества периодов контроля.
Более эффективным является другой подход к диагностике системы и принятию решение
об отказе, который заключается в следующем. Поведение во времени вектора параметров контроля E(t) можно рассматривать как случайный процесс, характеристики которого зависят от
множества факторов. К ним относятся ошибки измерения; погрешности отработки управляющих воздействий и моделирования движения объекта вследствие упрощения его модели; неточности знания конструктивных параметров КА, возмущающих воздействий и т.д. В этом
случае может проводиться не классификация по мгновенным значениям векторов невязок E(t)
в конце каждого периода контроля Tk, а классификация случайного процесса, представленного
дискретной последовательностью скалярных значений ek=e(tk), где k N 0 . Классификация такого случайного процесса реализуется с помощью математического аппарата последовательной проверки гипотез в виде модифицированного последовательного критерия отношения вероятностей Вальда (МПКОВ) [4, 5]. В этом критерии границы изменения контролируемых параметров зависят от времени (или числа периодов контроля), а также от принятого значения
погрешности оценки.
25
В общем случае МПКОВ обладает следующими важными свойствами:
- обеспечивает сходимость с вероятностью 1, причем настройкой пороговых значений
и можно обеспечить гибкое отслеживание уровня погрешности классификации;
- не требует независимости и равенства распределений вероятностей классифицируемых
случайных векторов;
- обеспечивает минимизацию среднего числа наблюдений, необходимых для достижения
заданного уровня достоверности оценки, и минимизацию среднего объема хранимой в
процессе классификации информации, что значительно упрощает его реализацию в
бортовом программном обеспечении СУД КА.
Процедура анализа с помощью модифицированного критерия Вальда реализуется следующим образом. Для каждого значения невязки параметров вычисляется вектор логарифмического отношения правдоподобия
k = – ln [P(Ek / W1) / (P(Ek/W2)],
(10)
где Ek – значение вектора E на k-том шаге вычислений; P(Ek/Wj) – функция условной плотности
вероятностей Ek при фиксированном событии, состоящем в том, что вектор Ek принадлежит
классу j {1,2} . Значение вектора k также является случайным. Поэтому с учетом (10) для независимого распределения значений вектора E вектор суммарного логарифмического правдоподобия после n наблюдений равен
L= – ln{P[(E1,E2...En)/ W1]/P[(E1,E2...En)/W2]} =
=
n
k 1
ln [ P(Ek /W1 )/ P(Ek /W2 )]
n
k ,
(11)
k 1
где k=1,2,…n – номер шага контроля, а W1 и W2 – классы состояния системы (соответственно
«норма» и «не норма»). Решающее правило МПКОВ имеет вид
L k E W1 ,
k L k ??? (обработку измерений продолжать);
(12)
kL
E W2.
По существу, это правило состоит в покомпонентном сравнении вектора L (11) с настраиваемыми (а не априори выбранными и фиксированными, как в [3]) границами k и k, которые
являются постоянными (как в классическом критерии Вальда) либо монотонно убывающими
функциями текущего дискретного времени k . Это позволяет [5] так построить последовательный классификатор, что можно регулировать как среднее число обработки признаков, необходимых для получения окончательного решения, так и вероятность ложного распознавания.
Синтез логического автомата реконфигурации управления
Оперативное блокирование развития аварийной ситуации осуществляется с помощью:
- отключения отказавшего прибора из контура управления и перехода на гарантированный
функциональный резерв СУД;
- перевода СУД в дежурный режим при сохранении ориентированного полета КА.
Восстановление работоспособности СУД КА включает следующую последовательность
действий:
1) анализ наличия резерва у отказавшего прибора, в том числе доступного функционального резерва в СУД;
2) подготовка к работе и включение резервного прибора в контур управления или реконфигурация СУД в случае применения функционального резерва;
3) восстановление ориентации КА, в общем случае исходной или базовой, ибо та ориентация, что была перед появлением отказа, далеко не всегда приемлема;
4) формирование информации для бортового комплекса управления о готовности СУД к
выполнению целевых задач КА.
Результаты диагностики (определения неисправного прибора) поступают в блок управления восстановлением работоспособности в виде СЛА A r реконфигурации. Набор стратегий
восстановления работоспособности СУД (переключение на структурный резерв бортовой аппаратуры либо переход на гарантированный функциональный резерв СУД, последовательность
26
изменения режимов работы, восстановление исходной ориентации и т.п.), соответствующих
возможным отказам приборов СУД, реализуется на программном уровне в БЦВМ.
Выбор алгоритмов реконфигурации осуществляется на основе инженерных методов и, как
правило, индивидуален для конкретного класса КА. Для каждого вида отказов приборов СУД и
их комбинаций составляются логические таблицы истинности, а затем компьютерными методами выполнятся синтез СЛА A r реконфигурации.
Отказоустойчивое гиросиловое
управление ориентацией КА
Возможности обеспечения отказоустойчивости гиросиловых СУД в отношении исполнительных органов определяются на этапе
проектирования. Здесь важную роль играет
выбор схемы силового гироскопического
комплекса (СГК) и его расположения относительно строительных осей КА. В СГК класса
2-SPE (см рисунок) один гиродин (№4) находится в «холодном» резерве, все четыре гиродина имеют возможность изменять положение
вектора кинетического момента H p в диапазоне
от базового направления
90
N p , p 1 : 4 , см. рисунок a. При отказе привода по оси ротора любого одного гиродина в
этой схеме выполняется реконфигурация СГК,
которая полностью нейтрализует аварийную
ситуацию [6] (см. рисунок b и с). Высокой
отказоустойчивостью обладает схема СГК типа 3-SPE на основе шести гиродинов, распределенных в три пары. Данная схема не имеет «холодного» резерва, но остается работоспособной при отказе любых трех гиродинов [7].
Отказоустойчивая схема 2-SPE
Заключение
Представлены приемы логико-динамического моделирования развития аварийных ситуаций, критерии диагностирования состояния, методы последовательной классификации отказов
приборов в контуре автоматического управления и его реконфигурации в механических системах, в том числе с избыточными гироскопическими связями. Кратко указаны некоторые результаты анализа гиросиловых систем управления космических аппаратов. Полученные результаты нашли практическое применение при создании гиросиловых отказоустойчивых систем управления ориентацией российских космических аппаратов [1], [6-8].
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Somov Ye .I. Methods and software for research and design of the spacecraft robust fault tolerant control systems // Automatic Control in Aerospace 2001. Oxford: Elsevier Science. 2002. P. 28-40.
2. Frank P.M., Ding S.X., Marcu T. Model-based Fault Diagnosis in Technical Processes // Transactions of the Institute of
Measurement and Control. 2000. Vol. 22. No.1. P. 57-101.
3. Макаров В.П., Платонов С.Н. Элементы искусственного интеллекта в задаче обеспечения живучести системы
ориентации ИСЗ // Динамика и управление космическими объектами. Новосибирск: Наука, 1992. С. 193-202.
4. Вальд А. Последовательный анализ. М.: Физматгиз, 1960.
5. Фу К. Последовательные методы в распознавании образов и обучении машин. М.: Наука, 1971.
6. Сомов Е.И., Бутырин С.А., Герасин С.А., Герасин И.А. Программное средство ДИНАМИКА в имитации гиросиловых отказоустойчивых систем управления ориентацией космических аппаратов // Навигация и гироскопия.
1999. № 42(25). C. 92-107.
27
7. Сомов Е.И., Бутырин С.А., Сорокин А.В., Платонов В.Н. Управление силовыми гирокомплексами космических
аппаратов // Интегрированные навигационные системы: Труды X Санкт-Петербургской Междунар. конф. С.Петербург: ЦНИИ «Электроприбор». 2003. C. 278-294.
8. Kozlov D.I., Anshakov G.P., Antonov Yu.G., Makarov V.P., Somov Ye.I. Precision flight control systems of Russian remote sensing spacecraft // Space Technology. 1999. Vol. 19. No. 3&4. P. 149-163.
Статья поступила в редакцию 7 марта 2008 г.
УДК 004.652.5
Т.И. Михеева, И.А. Рудаков, И.А. Чугунов
СИСТЕМА МОДЕЛИРОВАНИЯ «ТРАНСПОРТНАЯ ИНФРАСТРУКТУРА
ГОРОДА»
Рассматривается система имитационного моделирования различных управляющих стратегий для
транспортных потоков в городе с учетом конфигурации и характеристик улично-дорожной сети,
управляющего воздействия дорожных знаков и светофоров. Реализация системы моделирования
осуществляется в среде геоинформационной системы.
Введение
Успехи автомобилестроения последних десятилетий привели к «взрывному росту» автомобильного парка России, в значительной степени опережающего темпы дорожного строительства. В этой связи серьезную научную проблему представляет создание систем автоматизированного управления транспортной инфраструктурой. Требуются принципиально новые
подходы к созданию таких интегрированных систем, одновременно охватывающих массивы
разнородных данных и обеспечивающих многоуровневое взаимодействие множества подчиненных сложных подсистем. Транспортная инфраструктура города включает в себя уличнодорожную сеть (УДС), технические средства организации дорожного движения (ТСОДД) и
транспортные потоки (ТП). Создание и использование интегрированных интеллектуальных
транспортных систем (ИТС) как систем управления дорожно-транспортной инфраструктурой
урбанизированной территории позволит повысить уровень организации дорожного движения:
улучшить характеристики УДС, усовершенствовать дислокацию ТСОДД, оптимизировать процесс управления ТП на всех фазах движения, уменьшая транспортные задержки, повышая безопасность движения.
Управление транспортной инфраструктурой крупных городов с применением технологий
интеллектуальных транспортных систем все активнее используется в мировой практике организации дорожного движения. Укрепилась устойчивая тенденция дальнейшего совершенствования и внедрения таких систем, отдельные элементы которых реализованы в России.
В рамках создания интеллектуальной транспортной системы г. Самары существует необходимость разработки предметно-ориентированной среды моделирования и поддержки принятия решений для улучшения характеристик транспортной инфраструктуры.
Назначение системы
Система моделирования управления ТП предназначена для исследования поведения ТП
при различных стратегиях управления с использованием расширенной модели УДС [1] и обеспечивает:
обработку результатов измерения интенсивности ТП на улично-дорожной сети города,
хранящихся в базе данных ИТС;
сохранение обработанных результатов в базе данных и экспорта в формате CSV-файла;
проведение имитационного моделирования;
отображение карт распределения характеристик ТП в ГИС MapInfo по результатам моделирования либо обработки результатов измерения интенсивности ТП на УДС города.
Кроме построения непосредственно модели движения ТП, в системе решен ряд вспомогательных задач. Разработаны математические модели [2, 3]:
28
генерации транспортного потока – введения транспортных средств (ТС) в моделируемую УДС;
выбора цели – определения конечных пунктов следования ТС;
перераспределения транспортных потоков – выбора одного из возможных путей следования ТС;
управления – модель ТСОДД с формальным описанием их воздействия на поток транспорта в целом и на каждое транспортное средство в отдельности.
Определены некоторые параметры сети:
пропускная способность отдельных участков сети – пропускная способность входит в
модель перераспределения транспортных потоков как обязательный параметр;
транспортный спрос – на основании транспортного спроса строятся модели генерации
транспортного потока и выбора цели;
интенсивность транспортного потока.
Предметно-ориентированная среда моделирования и поддержки принятия решений для работы с транспортной инфраструктурой города использует объектные геоинформационные модели улично-дорожной сети, ТСОДД и транспортных потоков. Определены значения параметров, входящих в уравнения движения транспортного потока [4].
Моделирование может инициироваться как Экспертом в организации дорожного движения, так и некоторой Внешней системой. В первом случае система предоставляет пользователю
графический интерфейс пользователя, и результаты моделирования представляются в виде тематического слоя карты в ГИС MapInfo. Во втором случае система предоставляет программный
интерфейс приложения, и посредством обратных вызовов (callbacks) внешняя система получает сведения о координатах транспортных средств в модели, их скорости, затратах времени и
пр., а также запрашивает распределения интенсивности, скорости, транспортной задержки.
Форматы представления данных, внешних по отношению к системе
При моделировании изменений в структуре УДС не всегда удобно менять граф УДС, хранящийся в базе данных, в этой связи моделируемые изменения хранятся во внешней по отношению к базе данных (БД) структуре – патче, например, в файле.
Патч структуры УДС содержит в себе:
список узлов и дуг графа УДС, которые должны быть добавлены или удалены из модели транспортной инфраструктуры перед началом процесса моделирования;
список ТСОДД, которые должны быть добавлены или удалены из модели;
альтернативные значения транспортного спроса по транспортным районам.
Патч хранится в текстовом XML-файле.
Перед началом процесса моделирования необходимо указать ряд параметров:
шаг дискретизации по
времени;
Снимок
АИС построения модели УДС
(сущность в БД)
имя
используемого
снимка со значениями
Импорт модели УДС
интенсивностей
и
транспортного спроса;
ГИС MapInfo
Инструмент работы со снимками
используемый патч.
Результаты имитациФайл с
онного моделирования мораспределением
MapBasic-скрипты
погрешности
гут быть сохранены во
внешнем файле для того,
Получение данных для изображения
чтобы впоследствии их
Модуль отображения результатов моделирования
можно было отобразить на
карте или использовать при
Р и с. 1 . Компоненты, участвующие в импорте модели
сравнении нескольких ваУДС, обработке результатов измерений интенсивностей
риантов структуры УДС.
и построении карт распределения погрешности
Наиболее удобным форматом такого файла является CSV (Сomma-Separated Values), хранящий отображение множества
идентификаторов объектов УДС (узлов, дуг) на множество значений (интенсивности или
транспортной задержки).
29
Компоненты системы
Рассмотрим компоненты, участвующие в прецедентах, которые изображены на диаграмме
вариантов использования (рис. 1).
Прецеденты «Импортировать модель УДС», «Сформировать снимок», «Показать
карту интенсивностей». Интерфейс пользователя предоставляется компонентами «Инструмент работы со снимком» и «ГИС MapInfo». Инструмент работы со снимками производит импорт данных из автоматизированной информационной системы (АИС) построения модели
УДС, формирует снимок в БД, производит процедуру восстановления пропущенных значений
интенсивностей и формирует файл со значениями абсолютной погрешности восстановления
интенсивностей. Данные из этого файла могут быть представлены в виде карты в ГИС MapInfo.
В прецеденте «Показать карту интенсивностей» участвуют те же компоненты, но формируется
не файл со значениями абсолютной погрешности, а файл со значениями интенсивностей.
Прецедент «Имитационное моделирование в составе внешней системы». Система моделирования
Внешняя система
управления ТП предоставляет программный интерIModelling
фейс приложения для работы в составе внешней системы (рис. 2). Для этого модуль имитационного моМодуль имитационного моделирования
делирования должен быть оформлен в виде библиотеки или сборки .NET, а сам интерфейс (API) должен
быть документирован.
Р и с. 2 . Использование модуля
Прецедент «Имитационное моделирование без
имитационного моделирования
в составе внешней системы
внешней системы». Интерфейс пользователя использует тот же самый API, предоставляемый модулем
имитационного моделирования (рис. 3). Фрагменты исходного кода модуля, предоставляющего
интерфейс пользователя и взаимодействующего с модулем имитационного моделирования, могут служить примерами в документации к API.
Интерфейс прикладного программиста
При разработке API-модуля имитационного моделирования основным требованием является независимость от какого-то конкретного представления графа УДС. Для этого разработан
набор интерфейсов, реализовав которые, прикладной программист делает свое собственное
представление графа УДС «понятным» для модуля имитационного моделирования (рис. 4). Основу API-модуля имитационного моделирования составляют классы «Модель города», «Параметры моделирования» и «Результаты моделирования».
При создании экземпляра
GUI системы моделирования
IModelling
класса «Модель города» в его
конструктор передается ссылка
на экземпляр класса «ПараметМодуль имитационного моделирования
ры моделирования». Затем вызывается метод Загрузить_модель,
Файл с
в качестве аргумента методу пеГИС MapInfo
результатами
редается экземпляр класса «Замоделирования
грузчик графа УДС», поддержи(распределениями
интенсивности,
вающий интерфейс «Загрузчик
MapBasic-скрипты
средней скорости...)
графа»: вызовы методов список_дуг(), список_узлов() и т.п.
должны возвращать однонаправМодуль отображения результатов моделирования
ленный итератор, поддерживаюР и с. 3 . Компоненты, используемые при имитационном
щий интерфейс «Загрузчик объмоделировании средствами разрабатываемой системы
ектов». Через этот итератор экземпляр класса «Модель города» сможет загрузить соответствующие объекты графа УДС.
Методы Запустить_моделирование() и Остановить_моделирование() служат для управления модельным временем. В любой момент текущее состояние модели может быть получено в
виде структуры «Результаты моделирования» вызовом метода Получить_результаты().
30
Пользовательский интерфейс системы имитационного моделирования
Интерфейс пользователя предоставляет доступ к услугам модуля имитационного моделирования без необходимости написания программного кода. В компоненте, предоставляющем
интерфейс пользователя, реализованы:
диалоговое окно, позволяющее пользователю заполнить структуру «Параметры моделирования»;
класс «Загрузчик графа УДС» (рис. 4) экземпляр этого класса реализован паттерном
«Адаптер», загружающим граф УДС и представляющим его в виде, понятном модулю
имитационного моделирования, ссылка на этот класс будет передана в модуль имитационного моделирования;
окно, информирующее пользователя о ходе процесса моделирования (окно, изображающее
граф УДС с положением транспортных средств в модели);
элементы управления процессом моделирования – кнопки «Остановить» / «Продолжить»,
индикатор хода модельного времени;
диалоговое окно, позволяющее сохранить результаты моделирования в файле.
Загрузчик графа УДС
+список_дуг() : Интерфейс "Загрузчик Объектов"
+список_узлов() : Интерфейс "Загрузчик Объектов"
+список_транспортных_районов() : Интерфейс "Загрузчик Объектов"
+список_светофорных_групп() : Интерфейс "Загрузчик Объектов"
+список_светофоров() : Интерфейс "Загрузчик Объектов"
Интерфейс "Загрузчик графа"
Модель города
+Сконструировать(in параметры : Параметры моделирования)
+Загрузить_модель(in загрузчик : Загрузчик графа УДС)
+Запустить_моделирование()
+Остановить_моделирование()
+Получить_результаты() : Результаты моделирования
Результаты моделирования
Создает экземпляр
Передается в конструктор
Параметры моделирования
+снимок
+шаг_дискретизации
+патч
+адреса_callback'ов
+интенсивности
+транспортные задержки
+модельное время
+длины очередей
Р и с. 4 . API-системы имитационного моделирования
Логическая модель базы данных
Система моделирования использует БД для доступа к следующей информации.
Транспортная инфраструктура города. Структура УДС города меняется медленно, и в БД
необходимо хранить только текущее состояние УДС: структуру графа УДС, расположение и характеристики ТСОДД. Для моделирования каких-либо изменений в структуре УДС используются патчи. Структура УДС редактируется с помощью подсистемы построения модели УДС.
Результаты измерения интенсивностей. Процедура обследования участков УДС заключается в подсчете числа ТС, пересекающих сечения дороги в местах, соответствующих дугам
графа УДС. По результатам подсчетов дугам графа УДС ставятся в соответствие интенсивности движения ТС различного вида.
Снимки интенсивностей и транспортного спроса. Снимки формируются по значениям интенсивностей, сохраненных в БД.
Каждый подсчет интенсивности на УДС представлен в базе данных экземпляром сущности
Значение_интенсивности. Подсчет интенсивности уникально идентифицируется датой / временем подсчета и первичным ключом дуги графа УДС. В неключевых атрибутах зафиксирована интенсивность ТС различного типа (количество ТС/час).
Снимки интенсивности и транспортного спроса представлены в базе данных сущностями
Снимок, Снимок_интенсивности, Снимок_спроса, Транспортный_район.
Сущность Снимок – это контрольная точка, состояние УДС, зафиксированное в базе дан31
ных. Все экземпляры сущностей Снимок_интенсивности и Снимок_спроса, состоящие в ассоциации с одним и тем же Снимком, описывают УДС в одном и том же состоянии (например,
08.03.2007 в 9:00).
Снимок_интенсивности – это значение интенсивности и пропускной способности соответствующей дуги, зафиксированное в соответствующем снимке. Если при формировании снимка
для некоторой дуги найден подходящий результат значения интенсивности, то он будет включен в снимок. Если подходящий результат интенсивности не найден, то снимок интенсивности
помечается как вычисляемый. Кроме ключевых атрибутов, Снимок_интенсивности характеризуется значениями приведенной интенсивности (авт/час), пропускной способности (авт/час),
флагом «вычисляемое» и абсолютной погрешностью, которая является мерой противоречивости имеющихся данных об интенсивности на дуге.
Транспортный_район – это область города с относительно однородным спросом.
Снимок_спроса – это характеристика соответствующего транспортного района как источника или приемника ТС. В атрибутах Спрос_входящий и Спрос_исходящий хранится количество ТС в час, пересекающих границу транспортного района и имеющих район Источником
либо Целью (т.е. «зарождающихся» или «исчезающих» в выбранном транспортном районе).
Объектно-ориентированное проектирование системы моделирования
Система моделирования ТП представляет собой набор классов, помещенных в сборку .NET
[5]. «Точкой входа» для прикладного программиста является класс Модель города. Создание
экземпляра этого класса в пользовательском приложении дает пользователю доступ к услугам
системы имитационного моделирования. Основные компоненты системы – планировщик событий; структуры, хранящие модель УДС и состояние транзактов; структуры, собирающие
статистику в ходе процесса моделирования, являются частями класса Модель города, т.е. состоят с ним в отношении композиции и вне этого отношения не существуют.
Класс «Модель_Города»
На первом этапе декомпозиции в модели города можно выделить планировщик событий,
статическую часть модели (описание УДС и ТСОДД) и динамическую часть (парк ТС). Структура класса Модель_Города изображена на рис. 5 и образована следующими компонентами.
ТаймерМодели – это планировщик,
отвечающий за ход времени внутри
модели. В обязанности планировщика
входит пересчет модельного времени
по методу «Δt» и отправка уведомлений активным объектам модели о том,
что прошел очередной квант времени.
Получив уведомление, объекты смогут изменить свое состояние и состояние пассивных объектов модели
(например, элементов графа УДС).
Автопарк – это список ТС, осуР и с. 5 . Структура класса «Модель_Города»
ществляющих движение по УДС. Когда в модели создается новое ТС, оно добавляется в автопарк. ТС, двигаясь по УДС и достигая
пункта своего назначения, удаляется из автопарка.
Карта содержит описание структуры и характеристик УДС в виде графа УДС, расположение ТСОДД. Отдельным элементам УДС могут быть поставлены в соответствие «датчики» –
компоненты, собирающие статистику о ходе процесса моделирования.
Класс «Карта»
На рис. 6 изображена статическая диаграмма классов, реализующих модель УДС. Серым
цветом на диаграмме выделены классы, образующие структуру УДС: Транспортный_район,
Узел, Дуга. Экземпляры этих классов предназначены для хранения в процессе моделирования
соответствующих сущностей из БД в оперативной памяти. К вспомогательным классам относятся Генератор_СП (генератор случайного потока), Дорожный_знак, Светофор, Светофор32
ная_группа, Датчик_на_дуге, Источник_автомобилей.
Классы
Генера1
Карта
+Загрузить_карту()
тор_СП
и
Источ+Квант_времени()
*
ник_автомобилей.
С
1
Светофорная_группа
каждым объектом класса
1
1
Транспортный_район
1
Граф_УДС
ассоциирован генератор
1 +Загрузить_граф()
*
случайного потока собы- 1
+квант_времени()
1
Транспортный_район
тий и несколько источ1
*
1 *
1
1
ников ТС. Каждый экСветофор
земпляр класса Генера0..1
тор_СП
соответствует
*
*
1
случайному потоку автоГенератор_СП
Узел
Дорожный_знак
мобилей, зарождающих*
1
1
*
ся в выбранном трансначинается в узле
портном районе. Промезаканчивается в узле
жуток времени между
*
*
моментами
генерации
*
1
Источник_автомобилей
Дуга
двух последовательных
1
*
автомобилей в одном
1
0..1
1
Датчик_на_дуге
транспортном
районе
0..1
определяется как случайная величина с экспоненР и с. 6 . Структура класса «Карта»
циальным законом распределения. По случайному событию, сгенерированному экземпляром
класса Генератор_СП, в источнике
ТС появляется новый автомобиль.
Источники автомобилей распределены по транспортному району и
соответствуют местам, где одиночные автомобили могут присоединиться к ТП. Это могут быть выезды
из дворов, гаражных массивов, стоянки возле торговых центров (рис.
7).
Источники автомобилей располагаются на дугах графа УДС. Учитывая небольшую протяженность
дуг графа УДС в городе и небольшое
значение потока, вливающегося в
УДС в точках-источниках, по сравнению с потоком, движущимся по
дугам УДС, несколько источников,
располагающихся на одной дуге, Р и с. 7 . Расположение источников автомобилей
могут быть объединены в один. В системе имитационного моделирования предполагается, что
каждая дуга графа УДС может иметь ровно один связанный с ним источник либо не иметь ни
одного (например, дуга крупной автомагистрали или дуга, принадлежащая перекрестку, может
не иметь связанного с ним источника).
Класс Дорожный_знак. Дорожный знак является статическим объектом модели УДС в том
смысле, что в процессе моделирования не создается новых объектов класса Дорожный_знак и
не меняются характеристики уже существующих (новые знаки создаются/удаляются в системе
дислокации дорожных знаков на УДС). В процессе моделирования дорожные знаки влияют на
движение ТС по графу УДС. Так, при прохождении мимо знака, ограничивающего скорость,
меняется максимально допустимая скорость ТС. Влияние дорожных знаков учитывается также
при определении маршрута движения ТС.
Классы Светофор и Светофорная_Группа. Светофоры не могут быть целиком отнесены
33
ни к статической, ни к динамической части модели транспортной инфраструктуры: хотя в процессе моделирования не создается новых объектов типа Светофор, светофоры меняют свое состояние независимо от других динамических объектов предметной области. Для описания светофоров используются два класса:
класс Светофорная_Группа описывает группу светофоров на перекрестке, работающих
совместно по одной программе (класс инкапсулирует динамические свойства светофора);
класс Светофор описывает светофор как объект, установленный на дороге (класс инкапсулирует статические характеристики светофора).
Класс Светофор, как и Дорожный_Знак, характеризуется положением и зоной действия и,
являясь объектом на карте, привязывается к графу УДС. Светофоры располагаются перед перекрестками, железнодорожными переездами и пешеходными переходами, т.е. на границе
участков УДС, и привязка светофоров осуществляется к дугам графа УДС. Объекты класса
Светофор пассивны – они не получают уведомления от планировщика модели. Объекты класса Светофорная_Группа активны, они получают уведомления от планировщика и изменяют
состояние ассоциированных с ними объектов класса Светофор.
Класс Датчик_на_дуге. К некоторым выбранным пользователем дугам графа УДС прикреплены «датчики» – компоненты, собирающие статистику о ходе процесса моделирования.
Совокупность значений «датчиков» представляет собой результаты моделирования. Класс
Датчик_на_дуге накапливает статистику об интенсивности и средней скорости ТП, прошедшего по дуге за время моделирования. В зависимости от заданных параметров датчик может
аккумулировать как одно значение (среднюю интенсивность за все время моделирования), так
и историю значений с заданным шагом (например, для построения графика зависимости интенсивности движения ТП, проходящего по дуге, от времени).
За счет использования интерфейсов или введения абстрактного класса-датчика в разрабатываемую систему имитационного моделирования легко могут быть добавлены новые типы
датчиков, например, датчик, оценивающий уровень шума на автомагистрали на основании моментов прохождения автомобилей мимо датчика и их скоростей.
Класс «Модель_Транспортного_Средства»
Транспортное_Средство в разрабатываемой системе моделирования – сложный (составной) объект. ТС характеризуется:
постоянными характеристиками: номинальной скоростью, ускорением, замедлением;
постоянными характеристиками конкретного ТС (маршрутом следования, который не меняется на протяжении всего времени жизни автомобиля в модели);
динамическими характеристиками (положением ТС на графе УДС, его текущей скоростью,
совершаемым маневром, положением относительно других участников дорожного движения).
Эти характеристики представлены различными программными классами, связанными с
классом Транспортное_Средство отношением композиции. Каждый экземпляр класса Транспортное_Средство включает в себя экСмотрит вдоль
земпляры классов (рис. 8).
0..1
Маршрут – хранит последовательность
Датчик_на_автомобиле
Обстановка
1
дуг графа УДС, по которым должно про1
1
1
Анализирует
ехать ТС, и текущую дугу в этой послеАвтомобиль
довательности; маршрут определяется
1
1 1 1
при внедрении автомобиля в модель.
Маршрут
Блок_принятия_решений
Динамика – содержит в себе скорость,
Перемещает автомобиль по
1
Определяет
ускорение и расстояние от ТС до начала
1
текущей дуги графа УДС.
Тактика
Динамика
Тактика – содержит текущую тактику
Изменяет
1
поведения (свободное движение, следоР и с. 8 . Модель автомобиля
вание за лидером, маневр слияния, приближение к перекрестку), параметры
тактики (ссылку на автомобиль-лидер или узел графа стоп-линии перекрестка) и алгоритмы
определения ускорения ТС для различных тактик поведения.
Обстановка – содержит в себе ряд формальных признаков (флаги «близость перекрестка»,
«близость светофора», «наличие автомобиля-лидера», величины расстояния до лидера, до бли34
жайшего перекрестка, до светофора) и алгоритмы формирования признаков по текущему состоянию УДС (по характеристикам УДС, ТСОДД и других ТС).
Блок_принятия_решения – формализует зависимость тактики движения ТС от текущей обстановки; алгоритм [6] определения тактики ТС показан на рис. 9.
Датчик_на_автомобиле – необязательный компонент, выполняющий ту же функцию, что
и Датчик_на_дуге – сбор статистики о движении ТС; датчик определяет среднюю скорость и
величину транспортной задержки и сообщает их экземпляру класса Датчик_на_дуге, когда ТС
покидает дугу.
Начало
да
да
да
«Красный» свет?
Перекресток
регулируемый?
нет
да
Возле
перекрестка?
нет
да
Автомобиль не
задерживается на
перекрестке,
пересекая его,
как обычный
перегон
Нужно уступить
дорогу?
Автомобиль
останавливается на
перекрестке, ожидая
«зеленый» сигнал
светофора или пропуская
другой автомобиль
нет
нет
да
До автомобилялидера менее 5
секунд?
До автомобилялидера более
5 секунд?
Выбрать тактику
«Остановка»
нет
нет
Выбрать тактику
«Следование за
лидером»
Выбрать тактику
«Свободное
движение»
Конец
Р и с. 9 . Алгоритм работы блока принятия решений
Динамика процесса моделирования
Для управления динамикой процесса моделирования служит таймер системы моделирования, или планировщик. Планировщик реализован в виде класса ТаймерМодели – один экземпляр на модель. В обязанности планировщика входит пересчет модельного времени и отправка
сообщений (или выделение квантов времени) активным компонентам модели. Сообщения от
планировщика достигают цели по связям, совпадающим с ассоциациями, которые изображены
на рис. 5 и рис. 6; активация составного объекта также влечет за собой активацию составляющих его компонентов. Например, выделение квантов времени всем объектам класса Транспортное_Средство происходит путем активации объектов-синглтонов классов Модель города
и Автопарк (рис. 5). На рис. 10 изображены три последовательности сообщений, формирующих жизненный цикл экземпляра класса Транспортное_Средство. Каждая из них начинается
со срабатывания таймера модели.
Первая последовательность соответствует «холостому ходу» – в отсутствии ТС в модели
происходит лишь пересчет модельного времени и активация генераторов случайного потока –
до тех пор, пока не сработает один из них. Вторая соответствует срабатыванию одного из генераторов и созданию нового экземпляра класса Транспортное_Средство.
35
таймер модели
карта
граф УДС
генератор_сп
транспортный р-н
источник автомобилей
автопарк
Квант_времени() квант_времени
квант_времени
Квант_времени квант_времени
квант_времени новый_автомобиль
создать()
новый_автомобиль
автомобиль
автомобиль
добавить_автомобиль
Квант_времени квант_времени
квант_времени
принять_решение
квант_времени
передвинуться
уничтожить
Р и с. 1 0 . Жизненный цикл объекта «Транспортное средство»
При этом процесс создания нового экземпляра, добавление его в список ТС модели и внедрение автомобиля в УДС ложится на один из экземпляров класса Источник_автомобилей того
транспортного района, в котором сработал генератор. Третья последовательность соответствует движению ТС по графу УДС и возможному уничтожению экземпляра класса Транспортное_Средство по прибытии в пункт назначения (рис. 11). Кроме передвижения ТС по графу
УДС таймер модели управляет обновлением состояния объектов УДС: дуг графа УДС и светофорных групп. Каждая дуга графа УДС содержит в себе список ТС, находящихся на дуге, в той
последовательности, в которой ТС расположены на дороге. В каждом цикле системного таймера происходит сортировка списков ТС на дугах графа УДС. Другими объектами, требующими
активации в процессе моделирования являются светофорные группы. Объекты класса Светофорная группа должны получать управление для того, чтобы обновить свое состояние – переключить ассоциированные с ними светофоры в соответствии с заданной программой управления ТП.
таймер
карта
граф УДС
дуга
светофорная группа
Квант_времени()
квант_времени()
сортировать_автомобили()
обновить_состояние()
Р и с. 1 1 . Обновление статической части модели УДС
Модуль отображения результатов в ГИС
Импорт данных в MapInfo – процедура достаточно трудоемкая. В первую очередь это обусловлено особенностью работы MapInfo с внешними данными – связь с внешними данными,
36
обычно реализуемая в современных СУБД операцией JOIN, в MapInfo осуществляется добавлением к существующим таблицам дополнительных временных полей. Для облегчения импорта данных в MapInfo разработан специальный модуль, основное назначение которого – связать
различные форматы хранения данных (база данных, CSV-файл) с элементами графа УДС, хранящегося в виде карты в MapInfo (с дугами и узлами графа УДС).
Основные операции, которые поддерживаются модулем:
импорт из файла снимка значений интенсивностей ТП на дугах графа и величины транспортного спроса (отдельно входящего, исходящего либо суммарного);
добавление внешних по отношению к MapInfo данных (распределения скорости, транспортной задержки, уровня шума) в виде временных столбцов к элементам графа УДС,
хранящимся в таблицах MapInfo;
импорт из БД из выбранного пользователем снимка значений интенсивностей ТП на дугах
графа и величины транспортного спроса, значений абсолютной погрешности процедуры
восстановления интенсивностей и меры достоверности.
Импортируемые данные добавляются в соответствующие таблицы MapInfo и становятся
атрибутами сущностей графа УДС (узлов и дуг). Это позволяет проводить анализ импортированных данных средствами MapInfo – производить выборки, строить тематические карты и т.п.
Модуль отображения результатов моделирования реализован в виде динамической библиотеки
(DLL) и использующей ее программы на языке MapBasic. MapBasic позволяет расширять возможности MapInfo – добавлять пользовательские панели инструментов, выполнять SQLзапросы, манипулировать объектами на карте. Программный код из DLL содержит диалоговые
окна, позволяющие пользователю указать имя файла или название снимка в БД для импорта.
Проверка адекватности модели
Для проверки адекватности модели проведена серия имитационных экспериментов на тестовой
модели. Граф УДС тестовой модели состоял из 50 узлов и 70 дуг (рис. 12). В эксперименте при
различных значениях транспортного спроса фиксировались значения средней скорости и интенсивности ТП на одной из наиболее загруженных дуг модели. Плотность ТП оценивалась
исходя из основного уравнения потока. Неопределенность значения интенсивности возле точки максимума (точки насыщения потока) обусловлена возникновением затора в моделируемой сети при приближении к точке
насыщения. При возникновении затора ТП на
УДС скачком переходит из одного устойчивого состояния (свободный поток) в другое
устойчивое состояние (насыщенный поток)
[7]. В разных экспериментах зафиксированы
различные состояния ТП.
В разработанной модели воспроизвелись
следующие известные свойства ТП:
основная диаграмма транспортного потока;
Р и с. 1 2 . Граф УДС тестовой моде возникновение заторов при увеличении
ли. Образование затора
транспортного спроса и медленное смещение затора против направления движения транспортного потока;
наличие области неустойчивости на основной диаграмме ТП в области насыщения.
По результатам анализа аварийности за 5 лет (2002-2006 гг.) выбраны 50 наиболее аварийных перекрестков (на их долю приходится около 15% всех ДТП города). На выбранных перекрестках проведены подсчеты интенсивности ТП. Подсчеты проводились дважды в день, в
утренний и вечерний часы «пик», поскольку наибольший интерес представляет моделирование
УДС в состоянии максимальной загруженности.
Средства разработки и среда выполнения
Разработанная система спроектирована таким образом, чтобы максимально упростить повторное использование кода без ущерба производительности. С точки зрения возможности повторного использования кода, все программное обеспечение системы можно условно разде37
лить на две составные части: программные модули, представляющие собой законченные инструменты и не допускающие интеграции с другими программами, и модули (паттерны), которые могут быть использованы повторно в составе других программ.
Основной средой разработки выбран Visual Studio.NET, все модули, допускающие повторное использование, представляют собой сборки .NET и предоставляют программный интерфейс приложения (API). Для реализации этих компонентов выбран язык C#.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Михеева Т.И. Построение математических моделей объектов улично-дорожной сети города с использованием
геоинформационных технологий // Информационные технологии. 2006. №1. С.69-75.
2. Михеева Т.И., Михеев С.В. Модели наследования в системе управления дорожным движением // Информационные технологии. 2001. № 7. С. 50-54.
3. Михеева Т.И. Моделирование движения в интеллектуальной транспортной системе / Вестник Самарского гос.
аэрокосм. ун-та. 2004. С. 118-126.
4. Клинковштейн Г.И., Афанасьев М.Б. Организация дорожного движения: Учеб. для вузов. 5-е изд., перераб. и
доп. М. : Транспорт, 2001. 247 с.
5. Рихтер Дж. CLR via C#. Программирование на платформе Microsoft . NET Framework 2.0 на языке C#. Мастеркласс: Пер. с англ. М.: Изд-во «Русская Редакция», 2007. 656 с.
6. Кормен Т., Лейзерсон Ч., Ривест Р. Алгоритмы: построение и анализ. М.: МЦНМО, 2001. 960 с.
7. Михеева Т.И. Управление транспортными потоками. Учет ДТП. Самара: Самар. гос. тех. ун-т, 2006. 125 с.
Статья поступила в редакцию 30 января 2008 г.
УДК 681.3
Г.Н. Рогачев
ПРОГНОЗИРОВАНИЕ ВЕРХНЕЙ ГРАНИЦЫ КРИТЕРИЯ КАЧЕСТВА В ЗАДАЧЕ
ОПТИМАЛЬНОГО ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЯ ПРОЦЕССОМ
ИНДУКЦИОННОГО НАГРЕВА*
Предложен основанный на использовании теорем сравнения метод прогнозирования верхней границы критерия качества в задаче оптимального по быстродействию управления
процессом индукционного нагрева.
Сложно представить область науки или техники, где бы не использовались динамические системы и не изучались их модели в форме дифференциальных уравнений или гибридных автоматов. Метод анализа динамических систем, базирующийся на исследовании траекторий систем [1],
– один из наиболее активно развивающихся в последнее время. Известный вариант такого подхода предусматривает построения области достижимости динамической системы [2].
Понятие области достижимости предоставляет удобный язык, на котором могут быть описаны различные задачи теории управления. Если известны области достижимости, то можно
легко оценить возможности управления. Например, часто возникает такой вопрос: можно ли
перевести систему в некоторое предписанное состояние x * в предписанный момент T s ?
Для ответа на этот вопрос достаточно проверить, принадлежит ли вектор x * области достижимости. Предположим, что решается более общая задача о приведении системы в заданное
терминальное многообразие N в момент T . Ясно, что решение этой задачи эквивалентно выяснению того, пересекается ли многообразие N с множеством достижимости. Зная области
достижимости, мы можем проанализировать, как решение этих задач зависит от момента времени T и множества N . Пусть, наконец, необходимо решить задачу оптимального быстродействия. Эта задача состоит в приведении системы на заданное множество за кратчайшее время, что имеет и теоретическое значение, и практический интерес. С точки зрения областей достижимости вопрос состоит в следующем: требуется найти такое минимальное время T * , чтобы область достижимости в этот момент пересекалась с заданным множеством.
Эти примеры подчеркивают полезность использования областей достижимости в теории и
*
38
Работа поддержана грантом РФФИ (проект 08-08-00383-а)
практике управления. К сожалению, за исключением очень узкого класса систем, точное вычисление областей достижимости невозможно. Приближенные численные методы построения
множеств достижимости [3], [4], особенно для систем большой размерности, сложны в вычислительном плане и не обладают требуемой точностью.
Предлагаемая модернизация этого метода позволяет сканировать пространство состояний
системы, используя лишь некоторые из возможных траекторий. При этом удается получить
информацию, которая позволяет делать некоторые заключения относительно всех возможных
вариантов поведения системы или интересующих нас качественных ее характеристик. В основе
рассматриваемого метода лежат теоремы сравнения. Эти теоремы играют важную роль в исследовании различных классов задач как для обыкновенных дифференциальных уравнений,
так и для уравнений в частных производных. Такой подход носит также название метода дифференциальных неравенств [5] и является одним из наиболее эффективных в качественной теории дифференциальных уравнений. Порождаемые дифференциальными неравенствами суб- и
суперрешения и являются теми траекториями, которые «несут» в себе нужную нам информацию о системе.
В качестве примера рассмотрим, как использование теоремы сравнения позволяет сделать
прогноз верхней границы критерия качества в задаче оптимального по быстродействию управления при индукционном нагреве.
Процесс индукционного нагрева тонких цилиндрических оболочек может быть описан в
относительных единицах одномерным неоднородным уравнением теплопроводности
l , 2l ,
W l ,
l 2
со следующими краевыми условиями:
(1)
l ,0 0 ;
(2)
l ,
0;
l l 0
(3)
l ,
aL, .
l l L
(4)
Здесь – относительное время; l 0, L – относительная длина оболочки. Относительная температура окружающей среды считается нулевой, начальная температура нагреваемого
тела также равна нулю. В соответствии с уравнением (4) поток тепловых потерь с торца при
температуре L, пропорционален этой температуре. Необходимо определить управление –
зависящую от времени функцию W (l , ) распределения внутренних теплоисточников по
длине тела. С целью предельного повышения производительности управление должно обеспечивать перевод объекта ( 1 ) – (4) из начального состояния (2) в заданную область
l , K : max K l , K зад
l[ 0, L ]
за минимальное время
I K min .
(5)
(6)
В (5), (6) K – заданная требуемая относительная температура нагрева; зад const
– допустимое результирующее отклонение температуры в конце процесса от заданной, K –
время окончания процесса. Считается, что ограничения на температуру в ходе процесса
нагрева не накладываются, а на само управление накладывается ограничение вида
0 W l, 1l [0, L], [0, K ] .
(7)
Простейшим вариантом управляющего воздействия является одноинтервальное как по
пространственной, так и по временной координате управление
W l, 1l [0, L], [0, K ] .
(8)
Результаты численного исследования процессов одноинтервального управления (8) объектом (1) – (7) при различной интенсивности теплообмена a в (4) представлены на рис. 1, 2. Ха39
рактер расположения точек альтернанса результирующего температурного поля (рис. 2) свиде(1)
тельствует о том, что перепад температуры в конце первого интервала min
не может быть
уменьшен традиционными средствами сосредоточенного управления [6].
Р и с. 1. Предельная точность
вида (8)
(1)
min
управления
Р и с. 2. Результирующее температурное поле
при управлении вида (8)
(1)
Если предельная точность min
не удовлетворяет технологическим требованиям к точ(1)
ности нагрева, т.е. зад min
, то задача (1) – (7) оказывается неразрешима средствами
сосредоточенного управления. В качестве альтернативного варианта рассмотрим систему
распределенного по длине изделия управления мощностью [7]. Эта система производит последовательный опрос температурных датчиков, фиксирующих температуру в различных
точках нагреваемого тела. Когда температура в некоторой точке превышает уровень
К зад , осуществляется локальное снижение мощности в зоне расположения этого датчика
до минимального уровня,
1, (l , ) K зад
W l ,
l [0, L], [0, K ] .
0, (l , ) K зад
(9)
Были проведены расчеты процессов распределенного управления объектом (1) – (7) на основе алгоритма (9) в широком диапазоне изменения интенсивности теплообмена – параметра
a . Некоторые результаты расчетов представлены на рис. 3-5. Из расчетов следует, что точность нагрева p , обеспечиваемая управлением вида (9), в 1,6-11,3 раза превосходит предель(1)
ную точность min
сосредоточенного управления. Если достигаемая в результате использования
алгоритма (9) точность соответствует технологическим требованиям, этот закон управления может быть использован на практике. Но при этом возникает вопрос: как далек алгоритм (9) от оптимального?
Р и с. 3. Предельная точность
и точность
40
(1)
inf
управления (8)
p управления (9)
Р и с. 4. Результирующее температурное поле
при управлении вида (9)
Р и с. 5. Линия переключения управления (9) с максимального значения (серый цвет) на минимальное
(белый цвет) при различных условиях теплообмена
Вопрос о сильной сходимости закона управления (9) и порождаемых им траекторий к оптимальным достаточно сложен [8] и не имеет существенного практического интереса, в отличие от вопроса о сходимости слабой (в смысле критерия качества). Выясним, каким предельно
низким может быть значение критерия качества I K в задаче (1) – (7). Эта информация
позволит дать некоторую грубую оценку максимально возможных потерь производительности
в случае использования управления вида (9). Получим такую оценку с помощью леммы.
~
Лемма. Пусть решение задачи (1) – (7) существует, l , – решение системы (1) – (4) при
W l, 1l [0, L] [0, ] , а ~ – корень уравнения
~
min l ,~
к
l
Тогда справедливо неравенство
зад
.
(10)
I ~ ,
где I к – критерий оптимальности в задаче (1) – (7).
(11)
Доказательство: в условиях выполнения ограничения (7) l ,~ – суперрешение системы
(1) – (4). Поэтому, как следует из [5],
~
~
l , l , l [0, L] [0, ] .
(12)
Если lmin определить условием
~
~
lmin ,~ min l ,~ к зад ,
l
(13)
то из (12), (13) вытекает, что lmin ,~ к зад при любом законе управления W (l , ) . Следовательно,
~ max к l ,~ к lmin ,~ зад .
l
K окончания процесса распределенного управления (9) и ~ – нижняя граница
Р и с. 6. Время
(14)
Р и с. 7. Предельно возможные потери производительности при использовании управления (9)
критерия (6)
41
В работе [6] установлено, что функция , отражающая зависимость абсолютной погрешности нагрева от времени процесса, является строго убывающей. Из этого факта и соотношения (14) следует, что в интервале [0,~ ) условие (5) не выполняется, т.е. оно может
быть выполнено лишь при ~ . Таким образом, I ~ , что и требовалось доказать.
Опираясь на результаты леммы, получим величину предельно возможного уровня потерь
критерия качества (6) в результате использования неоптимального закона управления (9). Результаты численного моделирования процессов управления приведены на рис. 6, 7.
Время ~ , при котором выполняется соотношение (10), в соответствии с расчетами меньше
времени к на 0,8-4,7 %. Это означает, согласно оценке (11), что значение критерия качества
(6) может быть при уточнении закона управления (9) улучшено лишь на 0,8-4,7 %. Это позволяет сделать вывод о достаточно высоком быстродействии рассматриваемого алгоритма управления.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Clarke F. H., Ledyaev Yu. S., Stern R. J., Wolenski P. R. Qualitative properties of trajectories of control systems: a survey. CRM-2203, August 1994. 32 p.
2. Черноусько Ф.Л. Оценивание фазового состояния динамических систем. Метод эллипсоидов. М. Наука, 1988.
320 с.
3. Kurzhanski A.B., Varaiya P. On ellipsoidal techniques for reachability analysis. Optimization Methods and Software,
Vol.17, Taylor & Francis, 2000. P. 177-237.
4. Girard A., Le Guernic C., Maler O. Computation of reachable sets of linear time-invariant systems with inputs. Hybrid
Systems: Computation and Control, Vol.3927 of Lecture Notes in Computer Science, Springer-Verlag, 2006. P. 257-271.
5. Szarski J. Differential inequalities. Monografie Matematyczne, Tom 43, Warszawa, PWN, 1965. 256 p.
6. Рапопорт Э.Я. Альтернансный метод в прикладных задачах оптимизации. М.: Наука, 2000. 336 с.
7. А.с. № 1791965 СССР, МКИ3 Н 05 В 6/06. Индукционная нагревательная установка периодического действия /
Г.Н. Рогачев. Опубл. 30.01.93, Бюл. №4.
8. Рогачев Г.Н. Алгоритмы и технические средства сосредоточенного и распределённого управления процессом
индукционного нагрева: Автореф. дис… канд. техн. наук / Куйбышев, 1987. 17 с.
Статья поступила в редакцию 17 марта 2008 г.
УДК 65.01 519.5
А.В. Сергеев
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ФИНАНСОВЫМИ
ПОТОКАМИ ЭНЕРГОСБЫТОВОЙ КОМПАНИИ
Кратко изложено текущее состояние реформы электроэнергетической отрасли России и достигнутые на сегодняшний день результаты. Определены основные проблемы, с которыми сталкиваются энергосбытовые компании при работе в условиях либерализации рынка электроэнергии. Выполнен системный анализ проблемы и предложена концепция построения системы управления энергосбытовой компанией в виде многоконтурной иерархической структуры, в основе которой лежит
контур управления финансовыми потоками компании. На базе методологии поточно-финансовых
структур построена математическая модель контура управления финансовыми потоками компании.
В настоящий момент завершается процесс реформирования электроэнергетической отрасли России. Среди уже достигнутых результатов реформы можно отметить: создание конкурентного оптового рынка электроэнергии и мощности (ОРЭМ); частичную либерализацию региональных розничных рынков электроэнергии за счёт внедрения механизмов трансляции свободных нерегулируемых цен оптового рынка на розничных потребителей и создания предпосылок для развития конкурентных отношений между субъектами розничного рынка путём законодательного закрепления за потребителем права выбора поставщика электроэнергии; разделение региональных вертикально интегрированных обществ электроэнергетики и электрификации – бывших АО-энерго – по видам деятельности (производство, транспорт и сбыт электро-
42
энергии) и создание на основе выделенных генерирующих и сетевых активов крупных межрегиональных оптовых генерирующих и сетевых компаний.
Функции ведения договорной работы с потребителями электроэнергии и сбора денежных
средств за отпущенную электроэнергию остались за бывшими энергосбытовыми подразделениями АО-энерго, на базе которых были созданы энергосбытовые компании (ЭСК). Таким образом, энергосбытовые компании, по сути, стали выполнять роль инструмента управления финансовыми потоками от потребителей к производителям электроэнергии и сетевым компаниям,
обеспечивающим её транспорт.
С первого взгляда могло бы показаться, что ЭСК в результате реформы оказались в самом
выгодном положении, однако более детальное изучение данного вопроса показывает, что это
не так.
Во-первых, ЭСК являются заложниками платёжной дисциплины своих потребителей, поскольку несущественная с точки зрения потребителя задержка оплаты поставленной электроэнергии может привести к непоправимым для ЭСК последствиям. Дело в том, что правила
оптового рынка жёстко регламентируют сроки и объёмы платежей, в случае нарушения которых ЭСК может лишиться статуса субъекта оптового рынка электроэнергии. Кроме того,
предусмотренный законом график платежей для потребителей ЭСК намного мягче и не совпадает по срокам с графиком платежей, предусмотренным регламентами оптового рынка. Поэтому даже в случае идеальной платёжной дисциплины со стороны потребителей ЭСК всё равно
регулярно сталкивалась бы с дефицитом необходимых денежных средств (так называемыми
«кассовыми разрывами») при исполнении своих обязательств по оплате поставленной с рынка
электроэнергии и оказанных услуг по обеспечению её транспорта по электрическим сетям. В
сложившейся ситуации сбытовые компании вынуждены привлекать значительные кредитные
ресурсы и нести в связи с этим дополнительные расходы по оплате процентов по полученным
займам.
Во-вторых, в результате либерализации оптового рынка электроэнергии возможность выхода на него получили не только ЭСК, но и отдельные крупные потребители. В результате
начался массовый исход крупных платёжеспособных потребителей от ЭСК непосредственно на
ОРЭМ, что, естественно, не добавляет финансовой устойчивости ЭСК. Более того, с уходом
промышленных потребителей на оптовый рынок на регион перекладывается дополнительная
тарифная нагрузка, которую несли на себе данные потребители через завышенные тарифы,
субсидируя тем самым льготные группы потребителей (главным образом население), которые,
в свою очередь, оплачивают электроэнергию по заниженным относительно экономически
обоснованного уровня тарифам. В этом случае региональные органы государственного регулирования тарифов должны: либо дополнительно повышать тарифы для остальных потребителей,
либо, игнорируя данный факт, обрекать сбытовые компании на получение ими выпадающих
доходов, что может в конечном итоге привести к их финансовому краху.
В-третьих, в результате разделения АО-энерго по видам деятельности на несколько хозяйствующих субъектов у ЭСК сложилась такая структура финансовых потоков, при которой собственные расходы компании стали составлять всего 2-3% от общего оборота проходящей через
них денежной массы. Очевидно, что такая система обладает минимальным запасом устойчивости, и даже незначительные просчёты органов регулирования при принятии тарифнобалансовых решений в отношении сбытовых компаний или непродуманные решения собственного менеджмента компании при определении параметров и условий договоров, подготовке
предложений по тарифно-балансовым решениям, определении сроков получения и размеров
кредитных средств, разработке и реализации стратегии участия компании в отношениях по
купле-продаже электрической энергии на ОРЭМ и т.д. могут в достаточно короткие сроки
(буквально за 3-4 месяца) привести компанию к разорению или потере статуса субъекта оптового рынка. Причём исправление последствий, несущественных на первый взгляд ошибок порой занимает достаточно продолжительный период времени (от 1-го до 2-х лет), поскольку
может потребовать пересмотра законодательных актов, решений органов государственной власти, условий заключенных договоров, что связано с напряжённым переговорным процессом,
или вылиться в продолжительные судебные разбирательства.
Принимая во внимание изложенные выше обстоятельства, можно сделать однозначный
вывод о том, что для эффективного управления ЭСК последняя должна иметь соответствующую систему управления. Характерными чертами данной системы должны стать: явно сформулированные цели управления и критерии оценки степени их достижения; чётко определён43
ные центры подготовки и принятия решений, наделённые соответствующими полномочиями и
действующие в соответствии с общими целями компании; наличие системы обратной связи,
позволяющей оценивать результаты деятельности компании, производить анализ причин возникновения отклонений от ожидаемых результатов и корректировать алгоритмы и модели принятия решений.
Исходя из накопленного на текущий момент опыта работы энергосбытовых компаний
можно сказать, что данная система управления должна иметь несколько контуров управления,
каждый из которых, во-первых, должен обладать всеми общими свойствами системы управления, сформулированными выше, а во-вторых, будет определять условия функционирования,
критерии и параметры для внутренних по отношению к нему контуров. Можно выделить как
минимум три контура в системе управления сбытовой компанией: контур управления финансовыми потоками, контур управления финансово-экономическими показателями, контур стратегического управления.
Стратегическое управление компанией осуществляется на уровне Совета директоров и Генерального директора. Задачей контура стратегического управления является определение основных целевых установок стратегического развития компании. Например, таких, как повышение или снижение капитализации компании, расширение или сокращение рынка сбыта, максимизация прибыли или работа с определённым уровнем рентабельности, жёсткая борьба с конкурентами или кооперация с ними и т.д.
На следующем уровне системы исходя из заданных целевых установок осуществляется отвечающее им управление ключевыми показателями эффективности компании, к наиболее распространённым из которых относятся: прибыль, рентабельность основной деятельности, рентабельность собственного капитала, уровень оплаты электроэнергии, показатели финансовой
устойчивости и т.д.
На самом нижнем уровне системы управления, внутри финансового контура, на базе определённых выше ключевых показателей эффективности (которые могут выступать и в качестве
ограничений, и в качестве целей) осуществляется управление конкретными финансовыми потоками компании. Среди наиболее важных задач, решаемых в финансовом контуре, можно отметить следующие: прогнозирование поступления денежных средств, прогнозирование и оптимизация графика платежей, прогнозирование сроков наступления и размеров кассовых разрывов, определение параметров договоров с потребителями и поставщиками электроэнергии и
услуг, поиск кредитных линий с наиболее выгодными условиями, покупка и реализация активов, управление размещением собственных свободных денежных средств.
Таким образом, можно увидеть, что в основе системы управления энергосбытовой компанией лежит финансовый контур, и без решения задачи оптимизации его работы невозможно
построить эффективное управление компанией в целом, поскольку в этом случае будут отсутствовать реальные рычаги управления достижением целей верхнего уровня. С учетом этого
первоочередной задачей, по мнению автора, является изучение работы именно финансового
контура системы управления энергосбытовой компанией, и первым этапом в ходе этого процесса будет построение формализованной модели системы управления финансовыми потоками
компании.
Для того чтобы на базе искомой модели в дальнейшем можно было решать задачу оптимизации системы управления финансовыми потоками, она должна удовлетворять, по крайней мере, двум основным требованиям. Во-первых, она должна позволять количественно оценивать
влияние изменения параметров и условий функционирования финансового контура на результаты его работы. Во-вторых, она должна быть динамической, поскольку финансовое состояние
компании в каждый момент времени неразрывно связано с её предшествующими состояниями.
Среди современных методов моделирования социально-экономических систем данным
требованиям вполне удовлетворяет подход к описанию деятельности предприятий в виде поточно-финансовых структур (ПФС), берущих своё начало среди методов и подходов индустриальной динамики Дж. Форрестера [1].
Поточно-финансовыми структурами называются приёмы математического описания системы финансовых ресурсов предприятия, а также соответствующие им способы графического
изображения. Система финансовых ресурсов предприятия представляется в виде сети, в узлах
которой находятся финансовые счета предприятия – пассивы и активы компании, а дугами являются потоки финансовых средств между ними. На рисунке в первом приближении изобра-
44
жена полученная в результате изучения работы ЭСК модель её финансового контура в виде
поточно-финансовой структуры.
Модель энергосбытовой компании в виде ПФС
Финансовые счета компании изображаются в виде блоков-накопителей, уровень содержимого которых показывает текущее состояние счёта. Отражённые в модели финансовые счета
ЭСК можно разделить на три типа: активы компании, или средства компании, находящиеся в
её распоряжении; пассивы компании, или источники средств и обязательства компании; счета,
которые в зависимости от соотношения интенсивности притоков и оттоков средств в различные моменты времени могут представлять собой как активы, так и пассивы компании. Первый
тип счетов в рассматриваемой модели представлен одним единственным блоком – «Денежные
средства на счетах компании». Пассивы в данной модели представлены следующими блоками:
«Собственный капитал» на соответствующем ему счёте отражается сумма средств, вложенных учредителями компании в обеспечение её деятельности, т.е. данный счёт отражает обязательства компании перед её учредителями; «Кредиты и займы» блок, соответствующий счетам, на которых отражается величина внешних заимствований финансовых средств у кредитных организаций. Третьим типом счетов компании являются различного рода долговые обязательства, возникающие у компании перед поставщиками или у потребителей перед компанией.
При этом характер задолженности с течением времени может изменяться на противоположный,
т.е. не исключены моменты времени, когда может сформироваться кредиторская задолженность компании перед потребителями или дебиторская задолженность поставщиков перед
компанией. Данным счетам в приведённой модели соответствуют блоки: «Задолженность потребителей», «Задолженность по оплате покупной электроэнергии», «Задолженность по оплате
услуг по передаче электроэнергии», «Задолженность по оплате прочих расходов».
В рамках ПФС-методологии принято считать значения переменных, соответствующих активам, положительными, а значения переменных, соответствующих пассивам, отрицательными. Таким образом, значение переменной M (t ) , показывающей уровень денежных средств на
счетах компании, будет неотрицательным, тогда как значения переменных С банк (t ) и U (t ) ,
показывающих, соответственно, размер привлечённых кредитных ресурсов и величину собственного капитала компании будут неположительными. В свою очередь, переменные, описывающие изменение уровней дебиторской и кредиторской задолженностей, могут быть как положительными, так и отрицательными.
Текущий уровень содержимого блоков-накопителей является результатом притоков и оттоков на отрезке времени от начального до текущего момента с учётом содержимого в началь45
ный момент времени. Как известно, такое соотношение в математической записи выражается с
помощью определённого интеграла. Например, для блока-накопителя в ПФС на рисунке, соответствующего денежному счёту компании, можно записать следующее уравнение, связывающее величину его уровня с интенсивностью входящих и исходящих потоков:
f
t1
M (t )
пот р
(t ) f кр (t ) s пок (t ) s пер (t ) s пр (t ) s кр (t ) z % (t ) dt M (t0 ) ,
(1)
t0
где t 0 начальный момент времени; t1 текущий момент времени; M (t0 ) содержимое
накопителя в начальный момент времени; f потр(t ), f кр (t ) и s пок (t ), s пер (t ), s пр (t ), s кр (t ), z % (t )
соответственно, входящие и исходящие потоки, которые будут рассмотрены ниже.
После дифференцирования (1) по времени получим:
dM (t )
(2)
f потр(t ) f кр (t ) s пок(t ) s пер (t ) s пр (t ) s кр (t ) z % (t ) .
dt
Таким образом, скорость изменения уровня содержимого накопителя равна суммарной интенсивности притоков и оттоков с учётом их знака. Аналогично для остальных блоковнакопителей можно записать следующие соотношения:
dD(t )
v(t ) f потр(t ) ;
dt
(3)
dC пок (t )
z пок (t ) s пок (t ) ;
dt
(5)
dC пр (t )
z пр (t ) s пр (t ) ;
dt
(6)
dC банк (t )
s кр (t ) f кр (t ) ;
dt
(7)
dU (t )
(8)
p(t ) .
dt
Действующие между блоками-накопителями потоки средств рассматриваются как непрерывные переменные величины, значения которых равны интенсивностям потоков, и изображаются графически в виде линий со стрелками, указывающими направление движения средств.
При этом если между интенсивностями потоков существуют функциональные зависимости,
они изображаются знаком «вентиля» на линии потока, а линия от круга показывает передачу
информации об аргументах функции. Кружок, откуда исходит линия, обозначает отбор информации. Интенсивность потока может также функционально зависеть и от величины содержимого накопителя, или зависеть одновременно от нескольких аргументов. Кроме того, потоки
могут складываться и вычитаться друг из друга, для чего в системе условных обозначений методологии ПФС предусмотрен значок «сумматора».
В модели ЭСК, представленной на рисунке, определены следующие группы финансовых
потоков: выручка ЭСК от продажи электроэнергии своим потребителям, затраты компании,
прибыль компании, оплата поставленной электроэнергии и оказанных услуг, получение и возврат кредитных ресурсов.
Выручка от продажи электроэнергии является основным источником доходов ЭСК. В рамках рассматриваемой модели этот поток отражает стоимость отпускаемой потребителям электроэнергии и, накапливаясь, увеличивает их задолженность перед компанией (т.е. увеличивает
дебиторскую задолженность компании). Интенсивность данного потока равна сумме произведений объёмов электроэнергии Eiот п(t ) , отпускаемой в единицу времени различным группам
потребителей, на тарифы сiпотр, установленные для соответствующих групп:
v (t )
n
ciпот р Eiот п(t ) .
i 1
46
(9)
Со своей стороны потребители, производя оплату отпущенной им электроэнергии, снижают свою задолженность перед компанией и одновременно увеличивают сумму денежных
средств на её счетах. При этом интенсивность платежей f пот р(t ) в определённой степени зависит от информации о стоимости отпущенной потребителям электроэнергии. В то же время
эта зависимость в общем случае не является взаимно однозначной, поскольку потребление
электроэнергии происходит непрерывно, а её оплата производится частями в определённые
сроки, установленные договором энергоснабжения. Причём для крупных потребителей, как
правило, размер промежуточных платежей напрямую не связан с фактическими объёмами их
потребления внутри расчётного периода, а определяется объёмом заявленного ими в договоре
планового потребления. Таким образом, очевидно, что интенсивность потока оплаты зависит
как от фактической стоимости отпущенной электроэнергии, так и от параметров договоров.
Формально это можно записать в следующем виде:
,
потр
f потр(t ) F1 v(t ), p дог
(10)
потр
где p дог вектор параметров договоров с потребителями.
Со счетов ЭСК денежные средства уходят на оплату приобретённой на оптовом рынке
электроэнергии, на оплату услуг региональных сетевых компаний по передаче её до потребителей, а также на оплату прочих расходов сбытовой компании, необходимых для обеспечения
её деятельности, включая уплату процентов по банковским кредитам. В рассматриваемой модели ЭСК интенсивности данных потоков обозначены как s пок(t ) , s пер (t ) , s пр (t ) , z % (t ) соответственно. Очевидно, что интенсивность первых трёх из упомянутых потоков определяется
данными о стоимости поставленной с рынка электроэнергии и оказанных услуг, а в случае,
аналогичном ситуации с потоком платежей от потребителей, условиями соответствующих
договоров:
(t ) F z
(t ) F z
пок
;
s пок(t ) F2 z пок(t ), p дог ;
s пер
s пр
пер
3
4
пр
пер
(t ), p дог
пр
(t ), p дог .
(11)
(12)
(13)
Интенсивность уплаты банковских процентов зависит от текущего размера задолженности
и условий договора кредитования:
банк
z % (t ) F5 C банк (t ), p дог
.
(14)
Кроме того, на состояние денежного счёта влияют потоки получения и возврата кредитных
ресурсов, первый из которых зависит от состояния денежного счёта компании, а второй от
размера кредита и условий кредитного договора:
f кр (t ) F6 M (t ) ;
банк
s кр (t ) F7 C банк (t ), p дог
(15)
.
(16)
Потоки оплаты поступают на вход блоков, соответствующих долговым обязательствам
компании перед поставщиками; таким образом, данные потоки уменьшают пассивы компании
(поскольку, как уже было отмечено выше, переменные, соответствующие пассивам, являются
отрицательными, соответственно, положительные потоки уменьшают их значение по модулю).
На выходе данных блоков действуют потоки, соответствующие затратам компании, интенсивности которых отражают стоимость приобретаемых компанией ресурсов и услуг в единицу
времени. Непрерывно действуя, данные потоки увеличивают кредиторскую задолженность
компании.
Интенсивность потока затрат на покупку электроэнергии равна произведению объёма электроэнергии E пок(t ) , приобретаемой на оптовом рынке, на тариф оптовой покупки с пок :
z пок(t ) c пок E пок(t ) .
(17)
47
Интенсивность потока стоимости услуг по передаче электроэнергии можно принять равной
произведению объёма электроэнергии, отпускаемой потребителям, на соответствующий тариф
на услуги по передаче с пер :
z пер (t ) c пер E отп(t ) .
(18)
Разница между объёмами приобретаемой на рынке и отпускаемой конечным потребителям
электроэнергии равна её потерям в сетях региональных сетевых компаний.
Интенсивность потока прочих затрат компании не зависит от объёмов реализуемой электроэнергии и определяется условиями договоров:
проч
(19)
z пр (t ) F8 p дог .
Сумматор в ПФС-модели ЭСК, приведённой на рисунке, показывает известное соотношение между затратами, выручкой и прибылью компании:
z (t ) p(t ) v(t ),
(20)
z (t ) z пок (t ) z пер (t ) z пр (t ) z % (t ),
или в более привычном виде:
p(t ) v (t ) z (t ) ,
(21)
т.е. прибыль равна разнице между выручкой и затратами.
Поток прибыли исходит из блока, соответствующего собственному капиталу компании.
При этом, поскольку собственный капитал относится к пассивам предприятия, т.е. описывающая его величину переменная является отрицательной, положительный поток прибыли увеличивает собственный капитал по модулю; напротив, отрицательный поток (убыток) его уменьшает.
Уравнения (2) – (19), (21) представляют собой математическую модель финансового контура системы управления энергосбытовой компанией. При этом зависимости интенсивностей
платёжных потоков от времени в представленной модели носят импульсный характер (поскольку, как уже было отмечено, оплата производится только в определённые моменты времени), что затрудняет поиск и изучение аналитического решения системы (2) – (19), (21). В то же
время, перейдя от непрерывной формы записи к уравнениям в конечных разностях, можно на
основе данной системы построить имитационную модель финансового контура ЭСК и с её помощью изучать влияние параметров контура на протекающие в нём процессы, а также на эффективность функционирования компании.
Таким образом, предложенная модель энергосбытовой компании в виде поточнофинансовой структуры позволяет формировать количественное динамическое описание системы финансовых ресурсов компании, с помощью которого можно изучать влияние параметров
системы управления финансами компании на процессы, протекающие внутри неё, и на эффективность её функционирования в целом.
Способы математического описания системы потоков и накопителей, аналогичные применяемым в ПФС, являются распространёнными в технических и естественнонаучных дисциплинах. Аналогично представляются потоки электричества в электротехнике и потоки жидкостей в
гидравлике. Накоплен весьма значительный и успешный опыт использования способов математического моделирования с помощью систем дифференциальных уравнений в исследованиях и разработках технических устройств, что даёт основания считать концепцию ПФС базой
для дальнейшего развития количественных методов применительно к системам ресурсов предприятий.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
Форрестер Дж. Основы кибернетики предприятия (индустриальная динамика): Пер. с англ. / Под ред. Д.М.
Гвишиани. – М.: Прогресс, 1971. – 340 с.
Статья поступила в редакцию 10 апреля 2008 г.
48
УДК 681.5:681.3
В.К. Тян
СИНТЕЗ ЦИФРОВЫХ АВТОНОМНЫХ МНОГОМЕРНЫХ СИСТЕМ
УПРАВЛЕНИЯ С ПРИМЕНЕНИЕМ ПЕРИОДИЧЕСКИХ СТРУКТУР
Рассмотрена теория синтеза автономных многомерных цифровых систем управления, основанная
на структурном представлении обратных операторов. Полученные результаты позволяют проводить синтез многомерных линейных систем с использованием математического аппарата синтеза
одномерных систем управления. Кроме того, открываются широкие возможности в эффективном
использовании современной компьютерной техники (контроллеров) в управлении многомерными
объектами.
Введение
В настоящее время в мире выпускается широкая номенклатура компьютерных средств для
управления промышленными объектами. В арсенале известных фирм имеются необходимые
технические и программные средства для реализации систем управления, начиная от этапов
проектирования до их внедрения в производство. Характерным моментом для всех производителей современных средств автоматизации является практическое отсутствие технических и
программных продуктов, предназначенных специально для управления многомерными объектами. Это неслучайно и обусловлено как многообразием многомерных объектов управления,
так и недостатком инженерных методик синтеза многомерных САУ, позволяющих применить
аппарат синтеза одномерных систем автоматического управления к синтезу многомерных систем. Данная идея в свое время впервые была высказана И.Н. Вознесенским, однако остается
актуальной и по сей день [1].
Проектирование автономных многомерных систем автоматического управления (МСАУ)
связано с решением линейного операторного уравнения, имеющего вид [2-4]
(1)
Az u, u U , z F ,
где U, F– метрические пространства с соответствующими метриками u ( u1 ,u2 ) и F ( z1 , z2 ) ;
A – непрерывный оператор.
Под решением операторного уравнения, приведенного выше, понимается, что каждому
элементу u U соответствует z F . Понятие «устойчивости» решения z F на паре пространств (F, U) подразумевает выполнение критерия Коши [2, 5]. Сложность данного уравнения заключается в том, что решение не может быть найдено для произвольной правой части.
Структурное представление обратного оператора в банаховом пространстве
Функционирование обратного оператора в системах реального времени связано с решением проблем устойчивости и физической реализуемости. Решение операторного уравнения (1),
связанного с нахождением обратного оператора, представлено в [6, 7]. Приведем их краткое
содержание, основные определения и результаты.
В [6] предлагается алгоритм решения обратных задач, базирующийся на структурном представлении обратных операторов в виде периодической структуры следующего вида (рис. 1).
Р и с. 1. Структурное представление обратного оператора A-1
49
Здесь I – тождественный оператор, A – некоторый непрерывный оператор, отображающий
множество F в U.
Введены следующие понятия [6].
Определение 1. Оператор A0 называется стабилизирующим оператором, если для заданного прямого оператора A выполняется условие
I AA0 1 ,
(2)
где I – тождественный оператор.
Норма (2) определяется в каждом случае конкретно.
Определение 2. Структура, представленная на рис. 1, называется фундаментальной, если
последовательность операторов, описывающая данную структуру, при неограниченном увеличении количества периодических ячеек данной структуры является фундаментальной последовательностью в соответствующем пространстве.
Пусть в (1) U, F – банаховы пространства.
Лемма. Для того чтобы представленная на рис. 1 периодическая структура была фундаментальной, необходимо и достаточно, чтобы оператор A0 являлся стабилизирующим оператором.
Теорема. При выполнении условия фундаментальности периодической структуры фундаментальная структура является ограниченной, а оператор периодической структуры сходится к
обратному оператору A-1.
Структурное представление обратной передаточной матрицы
многомерного объекта управления с дискретным временем
С целью структурного представления обратной передаточной матрицы дискретного многомерного объекта управления приведем уравнения многомерного объекта управления и решения этих уравнений. В пространстве состояний они имеют вид
x(k 1) Ad x(k ) Bd u (k );
y (k ) Cd x(k ),
(3)
где k дискретное время, Ad – динамическая матрица, Bd – матрица управления, Cd – матрица
выходных координат для дискретного объекта управления, x(k ) – вектор состояния, u (k ) –
управления, y (k ) – выходных координат.
Решение уравнений объекта имеет вид
xk Ld k , k0 xk0
k
Ld k , Bd 1u 1 ;
(4)
k0 1
yk Cd k Ld k , k0 xk0 Cd k
k
Ld k , Bd 1u 1 ,
(5)
k 0 1
где k0 – начальный момент дискретного времени, матрица перехода Ld (k , k0 ) выражается через
фундаментальную матрицу (k ) следующим образом: Ld (k , k0 ) (k ) 1 (k0 ) .
Уравнения (4, 5) являются дискретными аналогами соответствующих интегральных уравнений для непрерывных систем управления. Естественно, все проблемы решения обратной задачи сохраняются и для уравнений (4, 5). Рассмотренные выше определение, лемма и теорема
аналогичным образом формулируется и для передаточной матрицы дискретного многомерного
объекта управления.
По аналогии с приведенным выше структурным представлением обратного оператора в
банаховом пространстве синтезирована периодическая структура, физически реализующая обратную передаточную матрицу многомерного линейного минимально-фазового объекта управления с дискретным временем (рис. 2).
В соответствии с общефункциональным подходом приведем некоторые понятия применительно к теории автоматического управления.
50
Р и с. 2. Структурное представление обратной передаточной матрицы
многомерного объекта управления с дискретным временем:
z оператор сдвига, zd выход дискретной периодической структуры
Определение. Назовем передаточную матрицу W0 z стабилизирующей матрицей, функ-
ционал I W z W0 z стабилизирующим функционалом, а представленную на рис. 2 передаточную матричную структуру фундаментальной, если последовательность периодических
структур передаточных матриц при неограниченном увеличении количества периодических
ячеек данной структуры описывается фундаментальной последовательностью передаточных
матриц.
В выражении функционала W z – передаточная матрица объекта управления с дискретным временем.
Лемма. Для того чтобы представленная на рис. 2 периодическая передаточная матричная
структура была фундаментальной, необходимо и достаточно, чтобы стабилизирующий функционал удовлетворял условию
I W(z)W0 ( z ) 1 .
(6)
Доказательство для систем управления с дискретным временем аналогично доказательству,
приведенному в [6] для обратного оператора в банаховом пространстве.
Теорема. При выполнении условия фундаментальности периодической структуры при неограниченном увеличении числа периодических ячеек фундаментальная структура является
ограниченной, непрерывной и сходится к обратной передаточной матрице модели линейного
минимально-фазового объекта управления.
Доказательство приведено там же.
Из изложенного очевидны аналогии в определениях и теоремах для абстрактного банахового пространства и для пространства передаточных матриц линейных многомерных объектов
управления. Таким образом, структурное представление обратной передаточной матрицы линейного минимально-фазового объекта по аналогии с определением обратного оператора линейного банахова пространства базируется на соотношении
lim Wn z W z I , n .
(7)
Индексом n обозначено количество ячеек, Wn z – передаточная матрица, описывающая
фундаментальную структуру длиной n .
Частотный диапазон, в котором выполняется условие (6), назовем интервалом регуляризации. Таким образом, в интервале регуляризации матрица периодической структуры сходится к
обратной передаточной матрице объекта управления, и физическая реализация обратной задачи в системах с причинно-следственными связями (системах реального времени) возможна
только в интервале регуляризации.
Для характеристики качества развязки каналов управления введем понятие обобщенных
частотных характеристик последовательного соединения периодической структуры и многомерного объекта управления, представляющего частотные характеристики произведения диагональных элементов их результирующей передаточной матрицы. Обобщенная АЧХ в интервале регуляризации при достижении высокого уровня автономности близка к единице, а обобщенная ФЧХ близка к нулю.
51
Область частот, лежащая вне интервала регуляризации, определяет погрешность решения
обратной задачи для систем реального времени и принципиально не может быть сведена к нулю. Полученные результаты позволяют синтезировать корректирующие звенья для достижения
автономности по вектору управляющих сигналов и инвариантности к вектору возмущающих
воздействий в системах автоматического управления в интервале регуляризации.
Анализ динамических свойств дискретного объекта управления
с периодической структурой
Рассмотрим многомерный объект с двумя входами и двумя выходами с непрерывным временем, описываемый следующей передаточной матрицей:
3.40.4 p 1
0.38 p 2 1.1 p 1
Wоб p
0.181.13 p 1
0.38 p 2 1.1 p 1
6.80.55 p 1
0.38 p 2 1.1 p 1
.
0.91.1 p 1
0.38 p 2 1.1 p 1
(8)
Передаточная матрица соответствующего дискретно-совпадающего объекта управления с
экстраполятором первого порядка, найденная в среде MATLAB, имеет следующий вид:
0.0357 z 0.0348
z 2 1.971 z 0.971
Wm z
0.0053 z 0.0053
2
z 1.971 z 0.971
0.0979 z 0.0961
z 2 1.971 z 0.971
.
0.0258 z 0.0256
z 2 1.971 z 0.971
(9)
Структурная схема дискретно-совпадающей модели объекта управления с периодической
структурой с шагом дискретизации τ = 0.01 показана рис. 3.
Р и с. 3. Структурная схема дискретно-совпадающей модели объекта управления
с периодической структурой с шагом дискретизации τ = 0,01
Степень развязки входов от несобственных выходов (степень достижения автономности)
может быть оценена по реакции системы на векторный управляющий сигнал вида col (1 0) и
col (0 1) (рис. 4, 5).
52
Р и с. 4. Реакция системы управления на задающий сигнал col (1 0)
Как следует из результатов моделирования, представленных на рис. 4 и 5, степень влияния
входов на несобственные выходы в системе «объект управления – периодическая структура» в
интервале времени 0-0.025 сек составляет 6-7 процентов на рис. 4 и более 100 процентов на
рис. 5, что объясняется конечной длиной интервала регуляризации и наличием высокочастотной части, лежащей вне данного интервала на обобщенной частотной характеристике.
Проведем анализ графиков, представленных на рис. 4. В интервале времени 0,025-0,04 сек
указанное влияние составляет не более 4 процентов. Далее влияние интенсивно уменьшается, и
после отметки времени, равной 0.23 сек, влияние первого входа на второй выход составляет не
более 1 процента. В установившемся режиме достигается полная автономность.
Р и с. 5. Реакция системы управления на задающий сигнал col (0 1)
Анализ графиков, представленных на рис. 5, показывает, что после отметки времени
0.23 сек влияние на несобственный выход тоже не превышает 1 процента, а в установившемся
режиме также достигается полная автономность.
Таким образом, наличие высокочастотной части периодической структуры, лежащей вне
интервала регуляризации, отрицательно влияет на качество достижения автономности. Однако
это является неизбежным моментом в достижении динамической компенсации в системах реального времени. Ниже будет рассмотрен вопрос уменьшения влияния высокочастотной составляющей периодической структуры.
53
Анализ частотных свойств дискретного объекта управления
с периодической структурой
Оценку частотных свойств рассматриваемой системы проведем на базе обобщенных частотных характеристик, вычисленных по следующим формулам. Введем следующие матрицы.
1 0
0.9 0
I , C
, n = 6 , τ = 0.01,
0.9
0 1
0
где n – длина фундаментальной последовательности, – интервал дискретизации.
Стабилизирующую матрицу вычислим по формуле
W0 ( z ) ( I C Wm ( z )) 1 .
(10)
(11)
Тогда передаточная матрица периодической структуры примет вид
n
Wkom z I I W z W0 z i W0 z .
i 1
ЛАЧХ и ФЧХ вычислим по формулам
A 20 log W e i Wkom e i
arctg
;
.
Re W e W e
Im W e i Wkom e i
i
i
(12)
(13)
(14)
kom
Во всех приведенных формулах ω – частота.
Соответствующие графики показаны на рис. 6 и 7.
Как следует из рис. 6, 7, в интервале регуляризации периодическая структура (динамический компенсатор) – объект управления представляет собой безынерционное звено с единичным коэффициентом усиления.
Р и с. 6. Обобщенные ЛАЧХ при различном числе
ячеек структуры:
А1(ω) – при n = 6; А2(ω) – при n = 10; А3(ω) – при
n = 13
Р и с. 7. Обобщенные ФЧХ при различном числе
ячеек структуры:
φ1(ω) – при n = 6; φ2(ω) – при n = 10; φ3(ω) – при
n = 13
Редукция многомерного объекта управления к совокупности
одномерных типовых объектов с дискретным временем
Как показал анализ переходных характеристик системы «объект управления – периодическая структура», а также анализ обобщенных частотных характеристик этой же системы, наличие высокочастотной части, лежащей вне интервала регуляризации, ухудшает качество управления. Наблюдается «просачивание» высокочастотной части спектра управляющего сигнала в
несобственный выход. Для окончательной развязки входов от несобственных выходов логично
в интервале регуляризации провести цифровую низкочастотную фильтрацию управляющих
сигналов. Параметры низкочастотного фильтра (НЧФ) определяются интервалом регуляризации.
54
Для подбора цифровых низкочастотных фильтров построим собственные частотные характеристики системы «периодическая структура – многомерный объект управления» в интервале
регуляризации (рис. 8, 9).
Р и с. 8. Собственная АЧХ по каналу между
первым входом и первым выходом
Р и с. 9. Собственная АЧХ по каналу между
вторым входом и вторым выходом
В результате аппроксимации АЧХ получены следующие цифровые фильтры:
0.0327839 2
;
W1 z
z 0.967216 2
W2 z
0.0246901 2
z 0.975312
.
(15)
(16)
На рис. 10 и 11 представлены частотные характеристики полученных цифровых фильтров.
Р и с. 10. АЧХ и ФЧХ фильтра первого контура
Р и с. 11. АЧХ и ФЧХ фильтра второго контура
55
Синтез дискретной редуцированной замкнутой системы
Модель дискретной замкнутой системы с экстраполятором нулевого порядка при
τ = 0,01 в среде MATLAB представлена на рис. 12.
В каждый канал установлены синтезированные выше цифровые низкочастотные фильтры
и цифровые ПИ-регуляторы.
Р и с. 12. Верификация замкнутой редуцированной системы управления в среде MatLab
Исследуем динамические свойства замкнутой системы и оценим степень достижения автономности цифровой системы управления, синтезированной с применением периодических
структур. С этой целью подадим на задающий вход векторный сигнал col (1 0), а затем –
col (0 1).
Переходные характеристики синтезированной системы представлены на рис. 13 и 14.
Р и с. 13. Вектор выходных координат при задающем векторе col (1 0)
Р и с. 14. Вектор выходных координат при задающем векторе col (0 1)
56
Анализ полученных результатов показывает, что степень влияния первого канала на второй
не превышает 0,2 процента, а степень влияния второго канала на первый составляет величину,
не превышающую 1,5 процента. Таким образом, редукция многомерной системы к совокупности одномерных дискретных систем управления с типовыми объектами управления с низкочастотными свойствами обеспечивает получение высокой степени автономности и, следовательно, возможность использования мощного арсенала средств синтеза одномерных систем управления для управления многомерными объектами.
Кроме того, полученные результаты позволяют внедрить в практику управления многомерными объектами современные контроллеры ведущих мировых производителей.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Морозовский В.Т. Многосвязные системы автоматического регулирования. М.: Энергия, 1970.
2. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. М.: Наука, 1979.
3. Тихонов А.Н., Гончаровский А.В., Степанов В.В., Ягола А.Г. Численные методы решения некорректных задач.
М.: Наука, 1990.
4. Тихонов А.Н., Кальнер В.Д., Гласко В.Б. Математическое моделирование технологических процессов и метод
обратных задач в машиностроении. М.: Машиностроение, 1990.
5. Колмогоров А.Н., Фомин С.В. Элементы теории функции и функционального анализа. М.: Наука, 1981.
6. Тян В.К. Структурное представление обратного оператора в банаховом пространстве / Вестник Самар. гос. техн.
ун-та. Сер. Физико-математические науки. 2007. Вып. №1 (14). С. 197-199.
7. Тян В.К. Теория периодических структур в некорректных задачах синтеза инвариантных и автономных систем
управления // Вестник Самар. гос. техн. ун-та. Сер. Технические науки. 2006. Вып. 41. С. 47-54.
Статья поступила в редакцию 15 декабря 2007 года
57